国土地理院の基準点成果の利用 using control point survey results made by the Geospatial Information Authority of Japan or GSI

Contents
はじめに
今日はカローラを車検に出すべく,カローラの販売店に出向いた。帰りは徒歩で,R171から離れるべく,都市労働者用宅地に蚕食された残存農地を歩いた。図1は,鍋田川の入り口付近で,箕面警察の南側を東西に走る道と交差する場所付近である。図2の白い住宅の後背には箕面市立第二中学校がある。木立なども文化が感ぜられず何とも殺伐とした風景である。
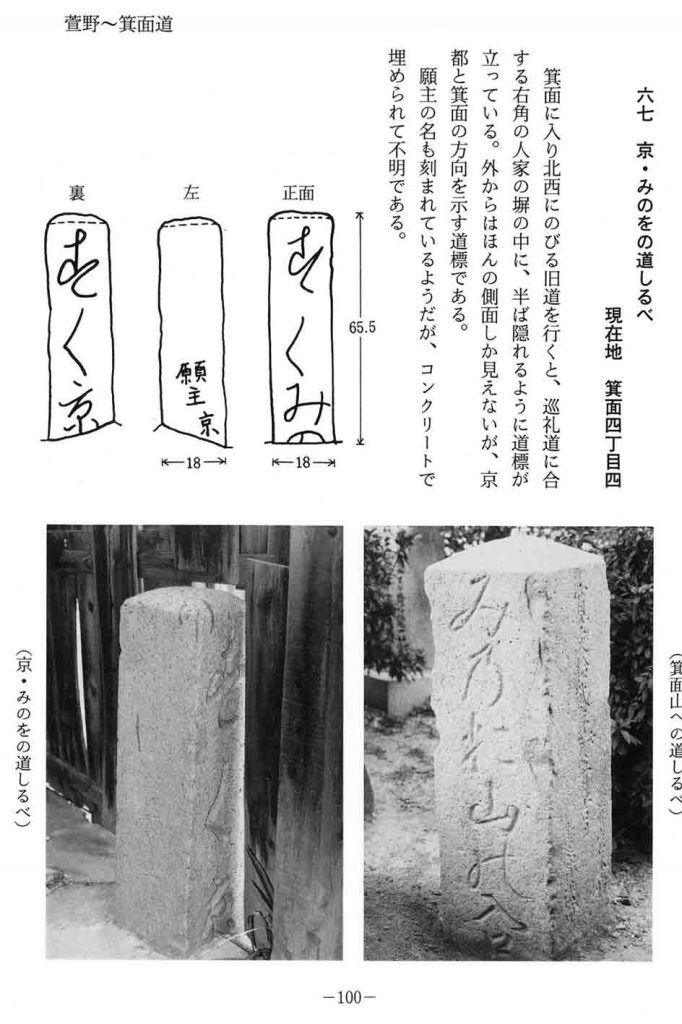
この川の左岸沿いに上って車道の交差点から東方向(ヴィソラ方面)に向かった。図3には装飾的に設置された道標が見える。『箕面の道しるべ』(箕面市文化財愛好会編,箕面市教育委員会刊, 1991年)によると,みのお山瀧への道しるべになっているようである。この裏面には,図4上段左端の碑文が見える。図3は同上段右端の碑文に相当する。おそらくこのp.100で紹介されている道標がここに1991年より後に移設されたのではないか,と考えた。ところが,本日Nov. 16にこの箇所を通ったので設置者の面(図3-3)を見ると,願主(図4上段中央の)とは違って,施主となっており同じ道標ではないことは確かなことであろう。この図3-3の施主の部分は,図4と同様「京」という字が見えて,名前のはじまりは「中」と読めるがその下の字は読めそうで読めない。拓本を取れば読めるかも知れない。
箕面にあたる字面は,みの織,みのを,ミ乃を,などがあるが,図3にみえる地名,みの□,は興味深い。□は,図3のように,扌偏に,二旁,で表現されている。なお,図3の,「みの扌二」のすぐ上の二字は,「むく」,つまり,向く,ではないだろうか。
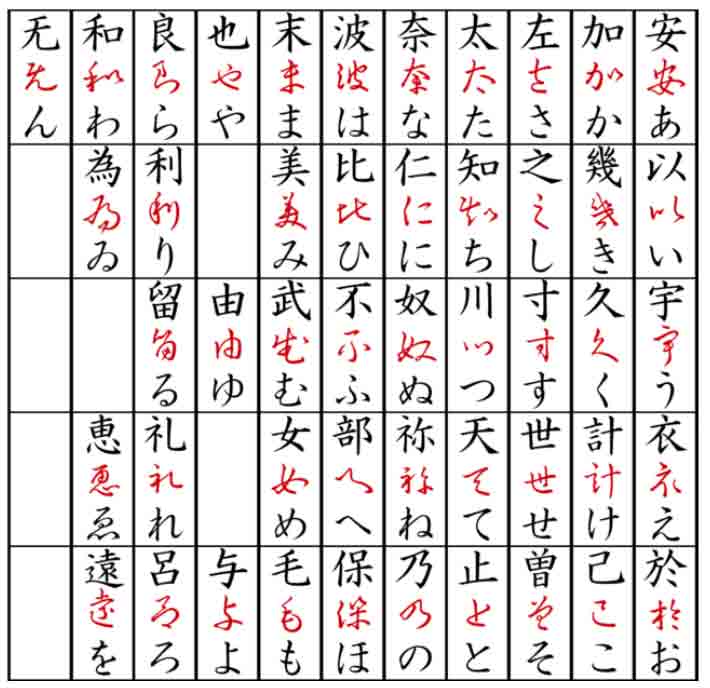
図0は,ひらがなを一音一字に統一した「小学校令施行規則」(1900年)に基づいて,作成されたものである。赤い文字はひらがなの前段階の草仮名(そうがな)。図3の道標の上二字を「むく」と考えて,図0から草仮名で,「む」に対応するものを見ると,必ずしも一致しているようには見えない。
で,「みの扌二」,の「扌二」に対応する「お」の草仮名を見ると,「於」が崩されたものであり,「扌二」ではなくて,「扌ミ」とすべきものである。石屋さんの学力での刻印なので,「む」も「お」も誤字が使われていると考えた方がよさそうである。道標の歴史的限界がここにも見える。
追記 Nov. 16, 2022:図3-1〜-3を追加した。
京や大坂などでは,箕面の滝は現箕面市域のうちでは,最も著名なランドマークであったようである。箕面の滝は,蓑が下がっている,つまり蓑が下がった面に見える瀧,として,発生した地名であろう。白糸の瀧などからすると,なんともロマン性から外れた命名ではある。






ヴィソラの西方150m見当に図5〜7のごとき異次元空間がある。散歩の際に,一度は通過したようにも思うが,本日はじめて中に入った。図5にOPEN看板が見える「ゴットウ デリ」ではおからの揚げたのだののオーガニック弁当を買って,ベランダで食べた。さっぱりして良い感じだった。パイプ椅子の脚がスノコに刺さって抜く時に指をぐねった。季節外れの蚊が右手首を刺した。図6の奥の林は隣接する当対池公園のものだ。図7の奥の「楽駝(らくだ)」は目の前でOPENになった。怪しいおっさんが出てきてCLOSEDの看板をひっくり返していた。午後3時すぎだ。この怪しいおっさんと,ふつうの奥さんと,話してみた。10円の駄菓子が小さな棚にみえる。小さなカウンターがある。ビールの絵があるので,質問したら自家製ビールだという。金曜日と土曜日の午後6時〜10時に営業しているようだ。ぼくの奥さんと来ると約束したものの帰宅して提案したら奥さんには脚下されてしまった。今週か来週あたり自転車に乗ってこのラクダを襲うつもりである。



以上,Nov. 13, 2022記。
1 基準点成果へのアクセス
比沼の真名井(京都府京丹後市峰山町久次)の大饗石(おおみあえいし)へのアクセスルートと,石そのもののマッピングをする準備の一つになる。アクセス過程を次に示す。
当方が暮らす場所では都市化が進んでいるので,基準点も京丹後市に比べたら圧倒的に多い筈だ。大饗石(おお-あえ-いし)付近にはまずは無いだろう。無くても問題ない。知りたいことは,既知の2点間について,Metascanを使ってLiDAR測量を実施して,測定結果がどの程度の誤差が生じるかである。比沼の真名井(京都府京丹後市峰山町久次)の大饗石(おおみあえいし)の図2のルートマップの想定出発点dから大饗石までは水平距離で1200mほどである。さらに,垂直距離は100mほどである。これをそのまま再現する必要性もないだろう。
1.1 国土地理院の基準点閲覧サービス利用
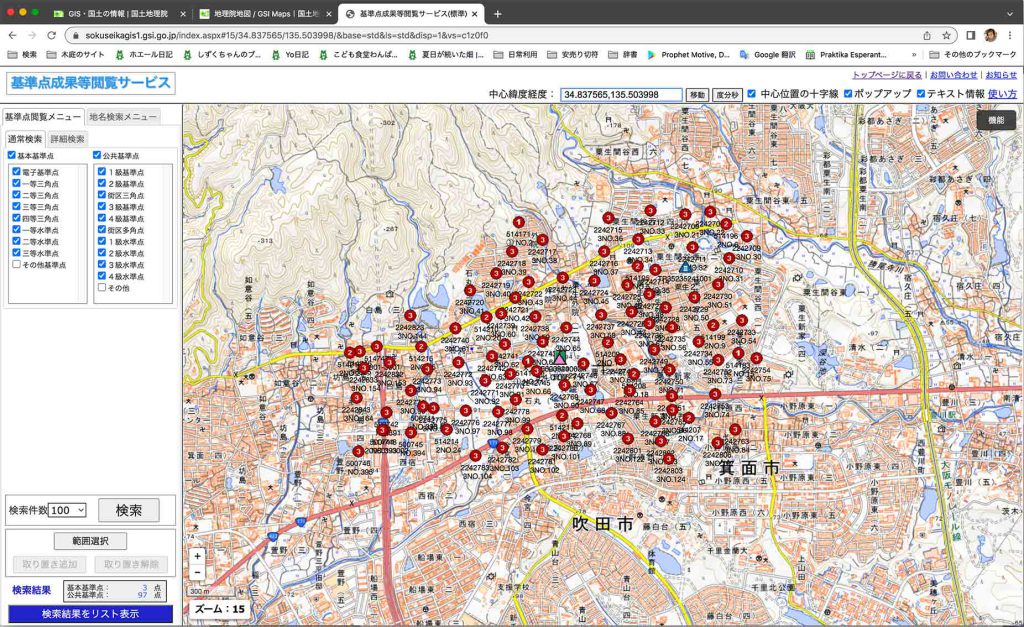
地理院地図(電子国土Web)から,基準点成果等閲覧サービス に入ることが出来るが,もちろん,基準点成果等閲覧サービスから直接入ることもできる。「通常検索」と「詳細検索」のタブがあるが,何故か「詳細検索」タブでは表示されず,デフォルトの「通常検索」タブで実行することになる。基本基準点,公共基準点のいずれにも,その他項目があるがチェックを入れると事実上フリーズ状態になってしまうので,その他には追加的にチェックを入れない方がよい。
図8は,当方自宅周辺を表示して検索したあと,ズームアウトした結果である。元々の範囲の検索結果が反映されている。この上段に,ブルーの「基準点成果等閲覧サービス」という文字が見えるが,この右手方向には中心緯度経度などが表示されているが,ポップアップ,と,テキスト情報,に,新たにチェックを入れている。チェックを入れることで,それぞれの基準点の下方に,成果IDと基準点名を,図8のように地図上で見ることができる。ぼくが知りたい座標値や海抜高度情報ではない。
この情報を使って,1.2kmほどの距離を持つペアを探す必要がある。LiDAR測量をしつつ基準点を見つけるのは難しいので,図8をズームインして目星をつけて,ペアを探さなければならない。これが完了し,更にLiDAR測量をした段階でこのページを追加したいと思う。なお,この作業の際には,ポップアップは煩いので,外している。
1.2 近所の基準点調査
図8のうち,近所の何点かが入った地図をプリントアウトして自転車で回った。驚いたことに一つも残っていなかった。国土地理院は何を思ってこのような意味の無い情報を公開しているのだろう。

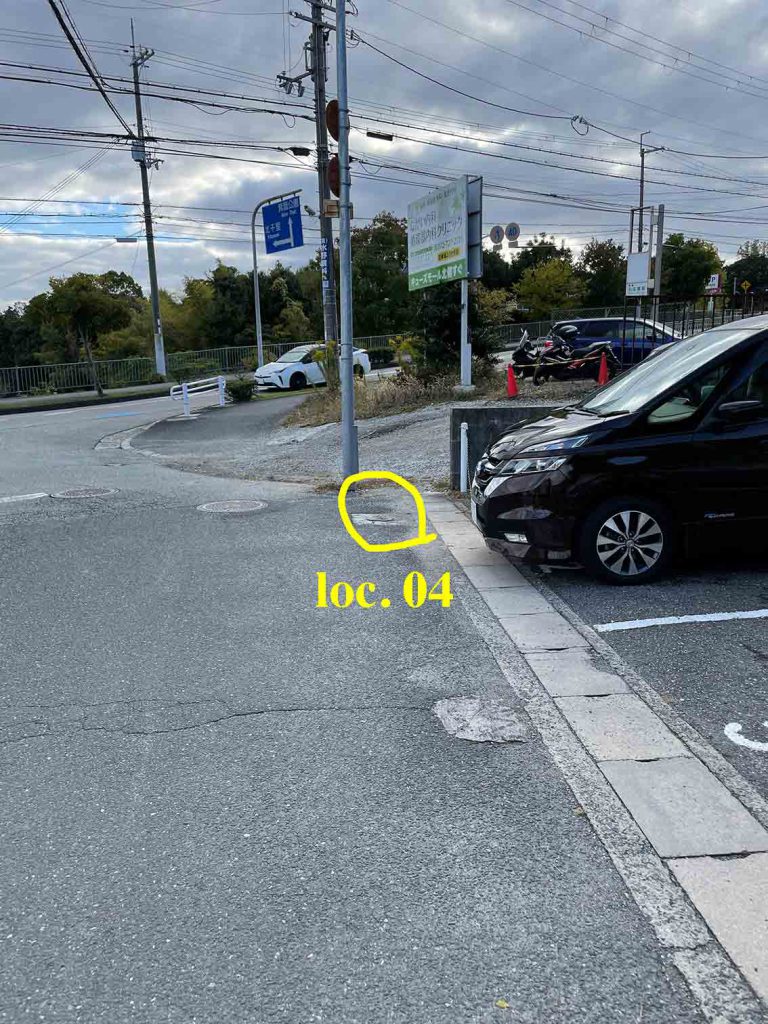
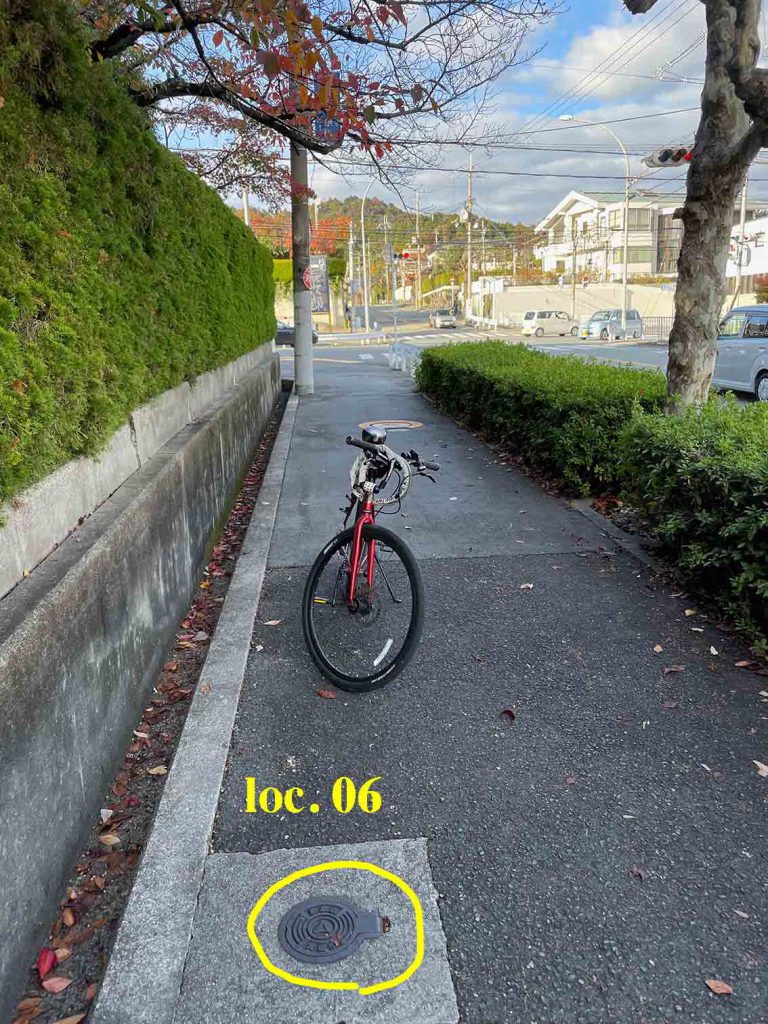
仮に,①〜⑥とナンバーリングして,それぞれの写真を次に示す。前半3件は真鍮製の基準点鋲で,Sシリーズナンバーがついている。後半3件はハンドホールのフタのみで,そういった情報はない。偶然であるが,このハンドホール3件はいずれも山麓線(箕面池田線)から少し入ったところに立地している。










箕面市役所に問い合わせて,みどりまちづくり部まちづくり政策室(かつての都市計画課)ではなく,道路管理室(別館5F)が管理保管していることがわかった。明日Nov. 15, 2022に訪ねるつもりだ。
以上,Nov. 14, 2022記。
昨日はタニハへ。今日,午後1時過ぎに訪問すべく,道路管理室に自転車で向かう。課題を次に。
1 ぼくのこのウェブページをプリントアウトして持って行く。一応,名刺も。
2 もちろん,閲覧依頼をする。可能ならば地図と基準点リストのコピー依頼。
3 国土地理院の基準点と,箕面市のそれとの関係を聞く。なぜ,更新されていないのかも聞く。
4 ハンドホールの基準点箇所と,真鍮鋲との位置関係(平面と垂直)を聞く。
1.3 箕面市の基準点情報
昨日Nov. 16(水),箕面市道路管理室に出かけて,多くの学びがあった。本日Nov. 17(木),その情報に基づいて,およそ想定できるルートを自転車で回って,「露出した真鍮鋲」と「ハンドホール内の真鍮鋲」の様態などを確かめた。関心の範囲は図9であった。
箕面市道路管理室の担当者には,丁寧にご対応頂いた。国土地理院の基準点成果等閲覧サービスの基準点情報の基準点が残っていないことを告げたら,その認識はなかった。本日巡ってみて,ぼくの認識ミスであることがわかった。真鍮鋲ばかり探していたので,ハンドホールに気付かなかっただけであった。図9の山麓線に近い④地点で,偶然?ハンドホールに「箕面市基準点」という刻印を見つけて後,いわば立て続けに計3箇所のハンドホールを見つけたが,これが国土地理院の三等基準点とは繋がらなかった。
本日Nov. 17,巡っている時には気付かなかったが,いま,調査結果?をこのWebページに入力を始めて,箕面市基準点のハンドホールが,国土地理院の三等基準点に対応することに気付いたのである。真鍮鋲には,例えば図13のように,S-200などのナンバーリングがある。この真鍮鋲に対しては標高情報がない。平面直角座標系の(X, Y)値だけである。4級基準点にあたっている。
今回の実験試行では,この真鍮鋲の基準点は省略しようと思う。今日, 真鍮鋲を確認することで現在位置の誤りに気付いたりしたが,計算過程の煩瑣をさけるためもあって,三等基準点限定にしたいと思う。ハンドホール内の真鍮鋲の配置は一定ではなく,一つ一つ確かめる必要がある。この作業が本日の中心的なものであった。以下,調査結果をまとめたいと思う。
測量結果をまとめる際には3D情報が必要なので前記のように三等基準点に限定して示す。


真鍮鋲の頭とホール周囲のレベルとの比高は,148 mm deepであった。
当方の住居そばなので,次の1点だけ,4等基準点を示す。


箕面市情報では,X= -128467.535 Y= -46253.261。三級基準点とあるが現在は4級基準点と称している。

真鍮鋲の頭とホール周囲のレベルとの比高は,140 mm deepであった。


真鍮鋲の頭とホール周囲のレベルとの比高は,164 mm deepであった。


真鍮鋲の頭とホール周囲のレベルとの比高は,143 mm deepであった。

真鍮鋲の頭とホール周囲のレベルとの比高は,155 mm deepであった。



真鍮鋲の頭とホール周囲のレベルとの比高は,115 mm deepであった。


真鍮鋲の頭とホール周囲のレベルとの比高は,170 mm deepであった。


真鍮鋲の頭とホール周囲のレベルとの比高は,148 mm deepであった。
以上,3-61, -41, -40, -39, -38, -43, -42, -44の8点の主に三等基準点のホール内真鍮鋲位置を示した。LiDAR測量の際は,ハンドホールの蓋が閉まったままなので,蓋のどの位置に真鍮鋲の中心があって,その位置から深さ何mmにその頭があるのかを求める必要がある。蓋のどの位置に真鍮鋲の中心があるのかは,後にイラストレータを使って示したいと思う。
なお,ハンドホールの蓋を開けるのにドライバーで十分かと思ったが,一応両釘抜を持参した。ぼくには最も近い図39の南西端の3-61に行ってみた。ここでは基準点を何度か探したがこれまでは見つからなかった。しかし,前々日に見たハンドホールを探してみると,果たしてあった。頭から真鍮鋲を探してしまうと決してこの箕面市基準点のハンドホールは見つからないのである。蓋は,この両釘抜だけで何とか開けることができた。どうもハンマーも必要だと感じて自宅に引き返した。図32や図37に見えるハンマーと両釘抜は必須であった。この両ツールを使ってもなお開けにくい蓋もあったのである。ホールの写真に見える曲尺(カネジャク)は偶然だが手頃だった。フィールドバックに入れていてもほとんど使ってこなかったのであるが。
2 LiDAR測量
2.1 ルート選定
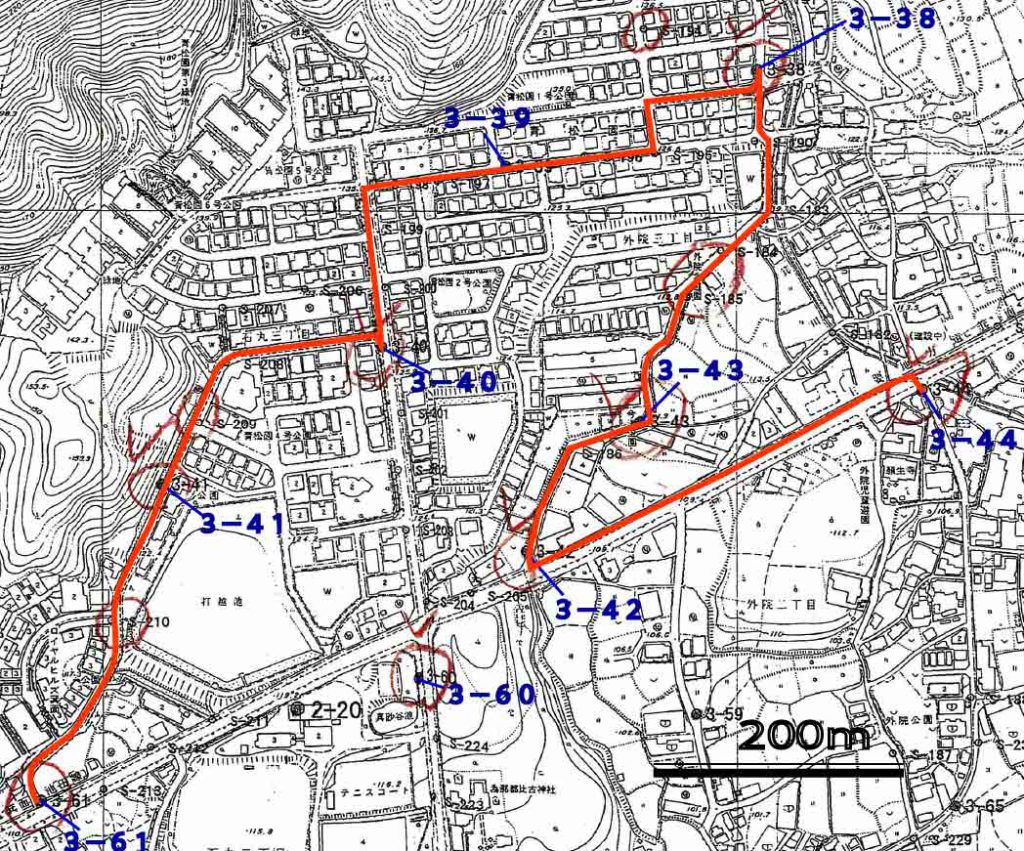
まずは,明日Nov. 18のLiDAR測量のルート図を描く必要があり,図39に提示した。南西端の3-61を出発し,-41, -40, -39, -38, -43, -42, -44と進むことになる。図39のスケールはグーグルマップから簡易的に求めたものである。これを使うと,1800m余りとなる。
2.2 Metascanの準備
Metascanは久しぶりに使う。
————————————————
Metascan(最新は,ver. 2.8.0 (Nov. 7, 2022))のトップページ: https://metascan.ai/
Start 3D scanning today https://metascan.ai/pricing
Freeでは,
For getting started.
$0/month
for individuals
Get Metascan
Unlimited LiDAR Scans
5 Photo Scans per month
USDZ, iMessage export
Share scans to web
HD Video export
Pro契約をすると,
For individuals.
$4.17/month
billed at $83.88 $49.99/year
Get Metascan
Everything in Free, plus:
150 Photo Scans per month
Maximum detail
Unlimited export
4K Video export
となっている。フリーでも,Unlimited LiDAR Scansのように見える。使用時間やファイル容量に限界がある。本日の経験では使用時間最大20分程度。この限界に達するとProにアップグレードするようにアラートが出るが,Proに替えても何ら能力は改善されない。
以前,写真モードでの再現性を主に確かめるために,月契約をした。早めに契約を切ると,残りの日数が目一杯使えるというような連絡があったので,忘れそうになったら,早めに終了の手続きをした方がよい。ただ,LiDARはProにしても全く改善されない。
tutorialsがあるがこれは,SDK 略=Software Development Kit●ソフトウェア開発キットなので,ぼくのようにこのMetascanのユーザーには関係が,無い。
————————————————
以上,Nov. 17, 2022記。
追記Nov. 18, 2022: 後述するように,LiDAR測量中に,Proへアップグレードが迫られて,パスワードが通らず,何故か,その次善の策として?,アップルストアのパスワードの更新が迫られた。それゆえ,metascanのパスワードの更新をしておこう。
1 iPhoneのMetascanのホーム画面の最上段右端の…をタップ。
2 Settingsをタップ。この最上段に,
Manage Pro subscription (150 photo scans left)となっている。(後述のように路上で購入したので)これを選択すると,Metascan Pro 月額¥780 更新日: 12月17日,となっている。この下に「サブスクリプションをキャンセルする」というボタンがあるので,更新日が近づけば,これを実施する。
4 Settings > Manage account に入る。Emailとして以前登録したメールアドレスがあり,現在主に使うものに変更した。そうすると,これに対応する新たなパスワードが求められるので入力した。その後,赤地の”Log in”ボタンが表示されるので,それをタップすると,新たなメールアドレスとパスワードの入力が求められるので,先に入力したものを再度入力すると,ログインが完了する。これで自らの情報を把握できたので,安心だ。
2.3 LiDAR測量時の問題点
この節を用意はしていたが,本当に問題点が出るかどうかは,わからなかった。本日午後4時過ぎから始めたのであるが,終わったのは午後5時半を過ぎた。そして,図39の想定ルートそのものだけでも,達成することができなかった。
1 秋の夕べの西日を背にして東方に,LiDAR測量を始めた。loc. 3-60からloc. 3-44に向かって山麓線の南側の歩道を歩いた。自らの影法師が撮影されるのを気にしつつ,歩いた。結構,普通に歩いていたがLiDARは地面を捉えていたように思う。loc. 3-42(山麓線の北側ではあるが)に当たるところぐらいからか,反応がにぶくなったので,ゆっくり進む必要に迫られた。いま思えば直射日光が無くなった頃からだと思う。
このルートは図39の予定には無かった。ぼくの住居そばの南西隅のloc. 3-61にあたる石丸二丁目の交差点を信号のみどりの内に渡りきれるかが気になったのである。無事渡りきることができたので,もうそのまま,山麓線を東に向かったのである。

2 図39のほぼ東端のloc. 3-44から信号を渡って山麓線の北側を西に向かったのであるが,100mも進まないローソンまたはカフェIchirinのそばで,LiDAR測量の終了をmetascanから迫られたのである。このMetascanのこのファイルのInfoのスクリーンショットを図40に示している。
ストーレッジを見ると,66MBほどである。この時間は不明だが,後の経験では20分ほどか。Dimensionsを見ると,113mL, 760mW, 13mHとなっているが,Lが南北軸,Wが東西軸としたいところだけど,図39を見ると,南北軸が時計回りに回転しているようだ。
路上で,Proへのアップデートが要求される。登録されているメールアドレスに対してのパスワードを入力するが脚下されて,新たなアップルへのログインパスワードの設定が要求されるので,新たなものを入力して,月単位のPro契約を実行した。自宅に戻ってアップルストアにログインするのに,この新しいパスワードが通った。
3 さて,つぎには,3-42まで移動して,ここから出発したのであるが,3-39に到着する前に,Proにアップグレードする前と同様に,LiDAR測量の継続ができなくなった。第1回目が66MBなのに,第2回目は27MBに過ぎない。因みに第3回目は20.6MBでこれはMetascanの限界ではなくて,ぼくが終了したことによるものだ。
結局,フリーの段階で一定程度の負荷を与えると,そのユーザーに対してProの利用を勧めるという形だ。ユーザーとしては,Proを購入すればこの限界が無くなるって,思うよねえー。でもそっそれはMetascanの有料ユーザー獲得の戦略であって,ソフトウェアの限界は全く超えることはでーきないんだねー。
4 今回の体験では,ちょっと驚いたことがある。
Taking good scans requires practice. Here are some tipsとして,次の項目がある。
Scan bright, well-lit areas and try to avoid capturing small objects.
Make sure your camera lenses are clean. Wipe them with a cloth before starting.
Check that the tracked feature points (colored dots) appear stable before you start scanning.
Aim to keep between 0.5 to 3.0 meters between you and the surface you’re scanning.
Avoid moving too quickly – it causes camera motion blur.
Avoid transparent, shiny or reflective surfaces such as windows, metal or mirrors.
Avoid any moving objects, people or animals.
このアドバイス群の最初,「Scan bright, well-lit areas」の意味がわからなかったが,今日の試技でよーく観念できた。図41はMy scansというホームページ。この左上のものが,暗くなってからのLiDAR作業のものである。Photoshopの低画質化で,3-39to3-61のファイルでも線が見えているが,ぼくのiPhone 12 Proの画面では,他の2件からするとほぼ見えない。その理由は暗い環境での撮影のためである。
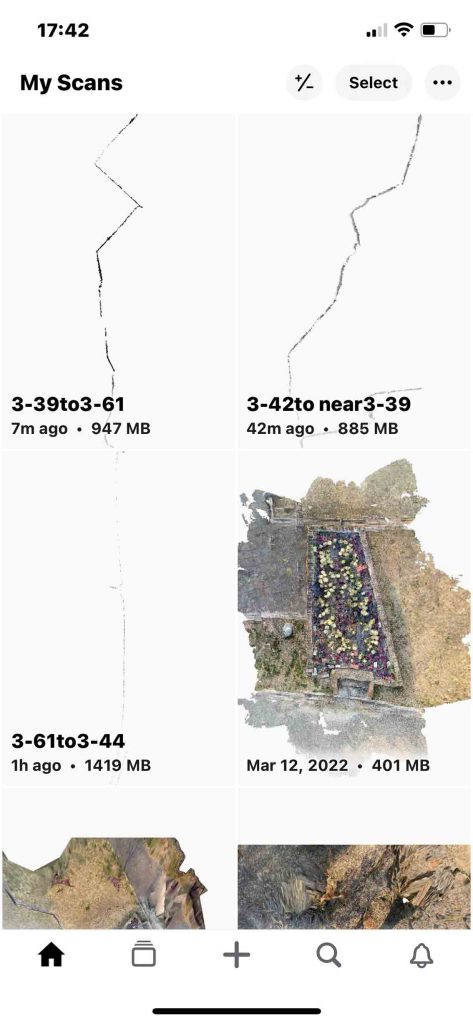

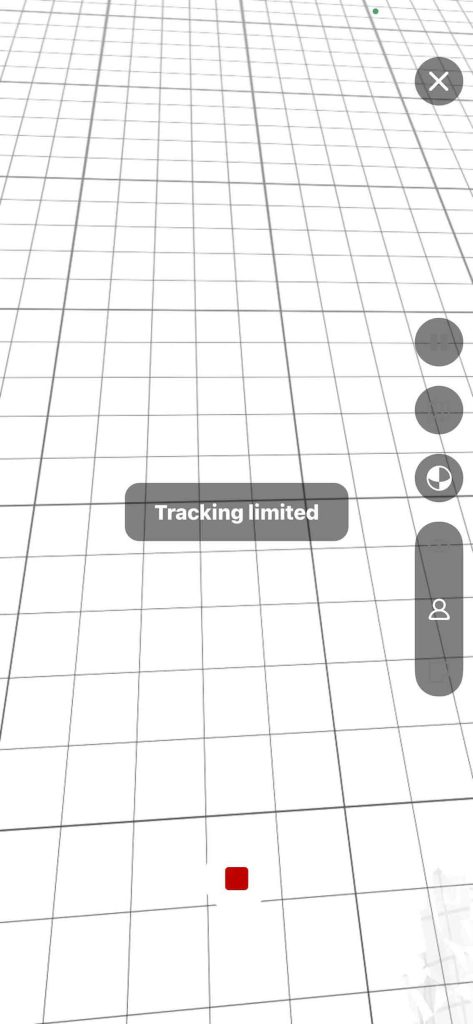
図42は暗い場合,色が再現されず,ほぼ黒色になっている。かつ,認識能力が落ちて,読み取れない部分が透明に抜けている。ただこの図42は街灯のそばや住宅の明かりのそばでの現象で,明かりが近くに無い場合は図43のように”Tracking limited”と表示され,読み取ることができなくなる。で,また街灯のそばに行くと,図42のように黒色で読み出す訳である。
実際に計測したいのは山林中で,町中と比べるとかなり暗いので,できるだけ太陽光が高くて雲が無い時が良いということになる。LiDARでは雨は敵とだけ思っていたが,曇りの日も良くないということである。簡単に納得できる表現で言えば,光学カメラでの撮影と同じということである。
2.4 ファイル出力
1 My Scansのファイルの表示で,最上段のSelectボタンをタップすると,ファイル選択画面になるので,今の場合,図41のルートスキャン3ファイルをタップする。そして,下段のアップロードアイコンをタップする。
2 ぼくが実験検証した Metascanの出力からテキストファイルを得る が最も参考になる。この結果によれば,LiDARモードで,表現力の高いポイントクラウドを得るのには,ply形式が良い。なお,画像的な表現力はぼくの経験からすると,mesh形式はFXB形式が良いので,この二つを出力してみることにする。
3 1で選んだ3ファイルについて,アップロードの書式としては,MeshとしてFBX,Point CloudとしてはPLYを選ぶ。なお,平面直角座標系との関連がわかりやすいのではないかと,XYZも選択することにする。AirDropを使ってmacに送った。
4 macのParallels DesktopにインストールしているWindosws X内のCloudCompareを立ち上げて,スキャンファイルを見ることにした。
2.5 現地でのLiDAR測量の適当な手法は?
Nov. 18の反省に立って,今日Nov. 19にもMetascanを実行した。その結果わかったことを踏まえて,このページに記録したいと思うが,明日からこの調査旅行なので,まとめる前に,気付いたことをここに示したい。
1 懐中時計とフィールドノートが必要
2 もちろんiPhone 12 Pro(満充電)と,携帯バッテリー。昨日はトータルの移動時間1時間半ほどでバッテリー残量が50%,今日は実働1時間ほどでバッテリー残量66%だった。大饗石の測量時間は不明だが2時間余りではないかと思っている。
3 iPhone 12 Pro付属の時計で,タイマーを15分間に設定にする。昨日の経験で20分ほどでMetascanが記録を強制的に停止するので,LiDARのセッションはそのまま続けて,自家製のマーカー1をまずはアラームが鳴った位置付近にセットし(マーカー1は動かさない),次に,20m?ほどスキャンしながら進んでマーカー2をセットして,このマーカー2をスキャンして,このセッションを終了する(マーカー2も動かさない)。終了すると,processingを開始する。継続時間によるが最大3分間ほどが必要である。LiDARモードは,サーバーへの写真のアップロードが必要な写真モードと異なり,計算所用時間は短い。なお,計算終了後,測量シリーズがわかるような名前でファイル名を付けた方が良いだろう。
次のセッションは,残していたマーカー1に戻る。まずはタイマー15分間を開始して,新たなスキャニングを始めるのであるが,マーカー1を含めてスキャンを開始する(マーカー1を回収する)。残していたマーカー2まで進みこれもスキャンする(マーカー2も回収する)。そしてこのセッションを15分のアラームが鳴るまで続ける。以下同様である。
4 なお,LiDAR測量のための移動速度であるが,日常の徒歩としては比較的低速で移動する感じがいいようだ。iPhone 12 Proの画面に読み取り過程は表示されるが,それを進行状況を睨みながら歩くとかなり遅くなってしまう。そのような歩き方をしなくても,画面を見ながら進めばスキャンがそれなりに進行してゆく。
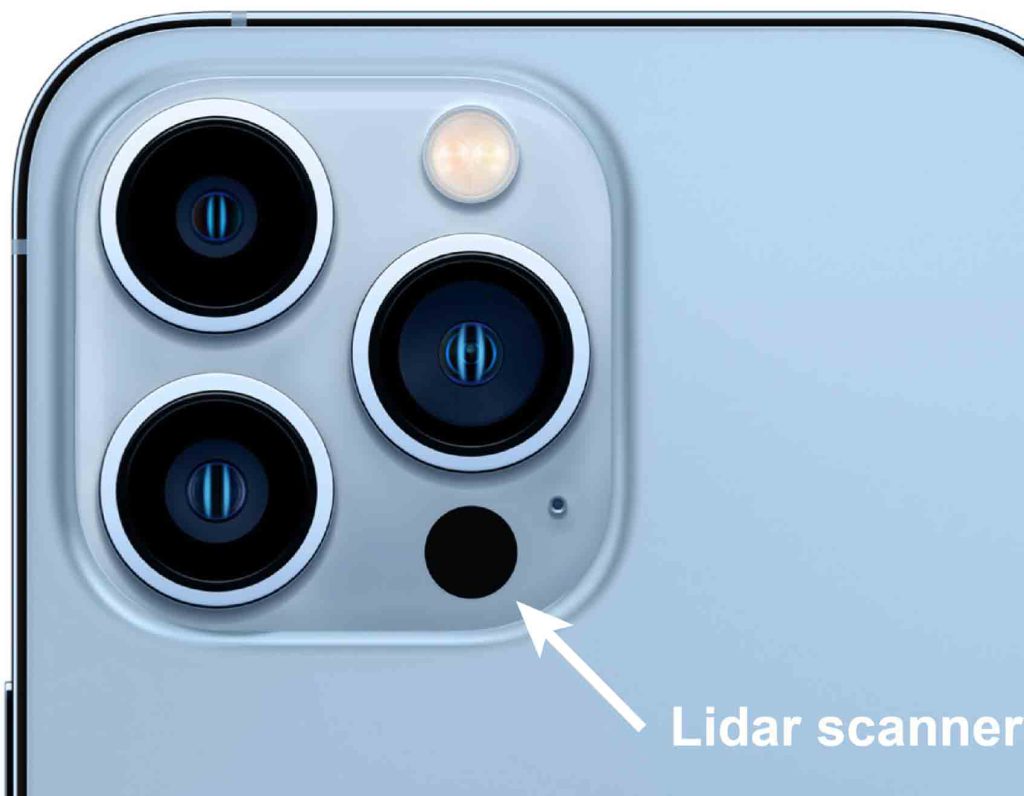
図44にはLiDARスキャナーの位置を示す。なお,図中の三つの大きなレンズは,
超広角
・焦点距離13mm
・視野角120度
・絞り値ƒ/2.4
・5枚構成のレンズ
・レンズ補正
広角
・焦点距離26mm
・絞り値ƒ/1.6
・7枚構成のレンズ
・光学式手ブレ補正機能
望遠
・焦点距離52mm
・絞り値ƒ/2.0
・4倍の光学ズームレンジ(2倍のズームイン/2倍のズームアウト) 接写はこの望遠レンズが使われると思われたがそう単純ではない。「接写」したつもりで,iPhoneの写真アプリでその写真を選んでその情報を見ると,使用されたレンズを見ることができる。接写したつもりであっても,広角カメラ 26mm f1.6の場合もあるし,望遠カメラ 52mm f2の場合もある。
・最大10倍のデジタルズーム
・6枚構成のレンズ
・光学式手ブレ補正機能
である。なお,右上の小さな薄茶色に見えるのはストロボだ。
LiDAR撮影の際には,このLiDARスキャナーの表面の汚れを布(紙は決して使ってはいけない,レンズなどに傷が付く)で拭き取ることも必要だ。スキャン移動中に脚が入るのがまずいことと,レーダー光の適正な感知範囲が0.5〜3.0mであることを考慮しつつ,iPhone面を45°程度頭を上に上げるのがいいようだ。そうすることで先の感知範囲が広がり,歩行移動速度への対応も改善されるように思う。
追記,Dec. 13, 2022: LiDAR測量の際は,スタート時からiPhoneに充電器を付けて実行した方が良いようだ。少なくとも30分ほどの使用であれば,iPhone本体のバッテリー残量は変化しない。
以上,Nov. 19, 2022記。
3 測量結果をCloudCompareで平面直角座標系に載せる準備
もう,このページを書いて二十日ほどが経ってしまった。峰山町の大饗石のLiDAR測量準備のために,このページを開設したのであるが,Nov. 21には大饗石のLiDAR測量は終わっている。
大饗石のLiDAR測量をまとめる前に行きがかり上(そしてネット上の誰かのためにも?),このページを完結させる必要がある。これまでの石丸付近での撮影ファイル群のすべてを処理する意欲は失われている。そこで,Nov. 19のラストトリップだけ,まとめたいと思う。このラストトリップはこの一連のトリップのうちで,LiDAR撮影能力が最も高まった時のものである。
My Scansのうち,当該ファイルを選んで,meshファイルのうち,fbxは,airdropを使って,macにアップロードできた(38MB)が,point cloudファイルのうち,ply は当初airdropでmacを検知できず,Google Driveにアップロードしようとしたが途中で失敗,再度airdropを使ったらmacを検知できて,今,アップロードできた(289MB)。あと,point cloudのxyzを選んだ(zipアーカイブで344.5MBであるが解凍の後に開くことができる)。

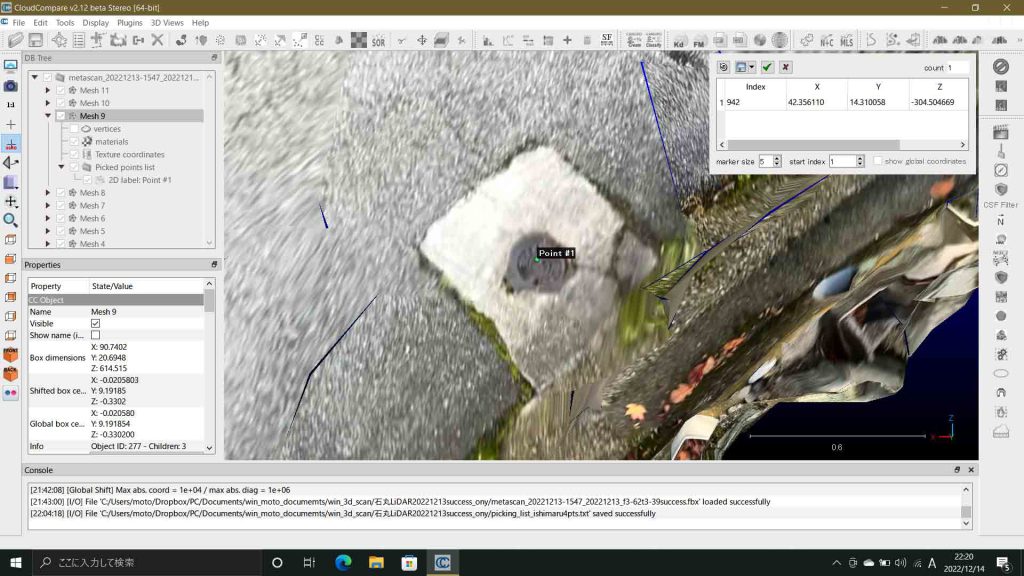
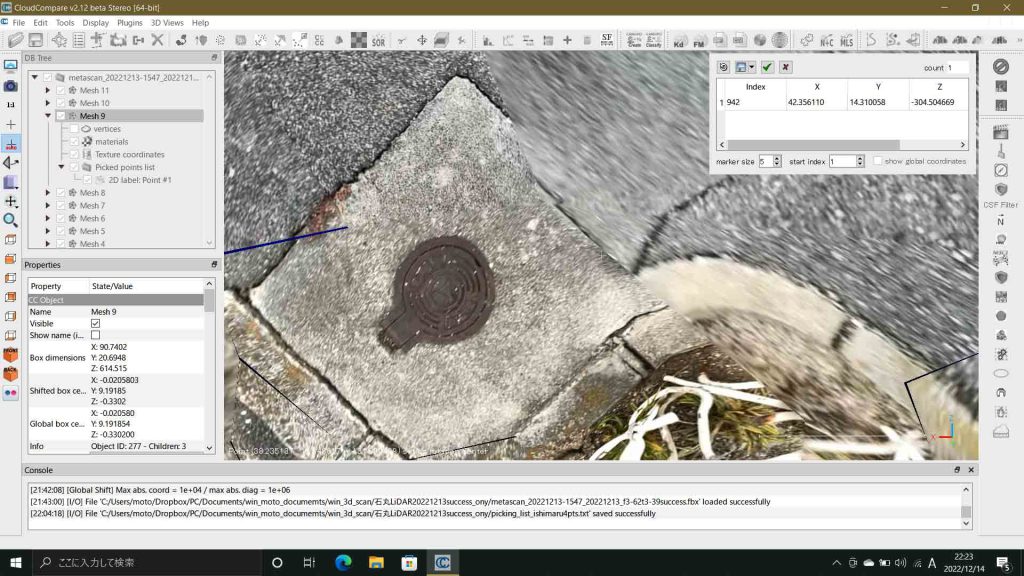
ぼくの場合,ここでは,CloudCompare on Windows 10 of Parallels Desktopを開いて,これらのファイルを全部インポートした。CloudCompareで3ファイルを表示してみると,fbx(FilmBoX)が圧倒的に画質が優れており,図45のように,3等基準点が収納されているハンドホールの蓋を見ることができる。
3.1 ハンドホールの蓋と三等基準点の関係
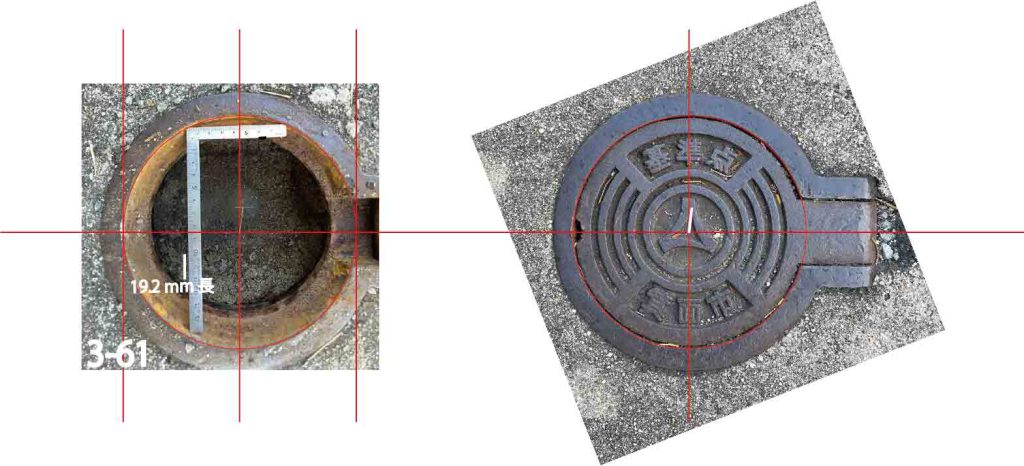
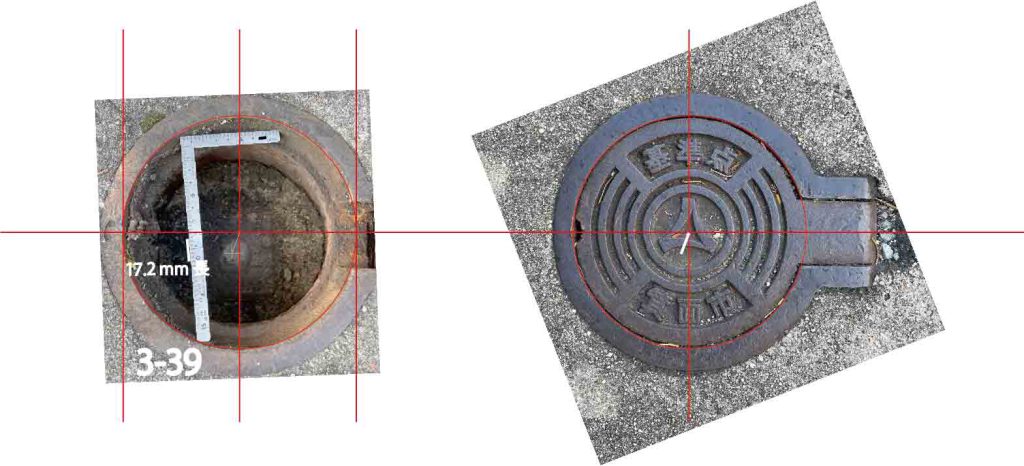
図45ではこのハンドホールの中央のLiDAR測量座標値を示しているが,この点は必ずしも3等基準点に該当しない。この蓋を開けてこの蓋の中央点と基準点との対応を見る必要がある。しかし,作業上,別の観点がより実際的と思われるのである。以下,国土地理院三等基準点の3点3-61,3-41,3-40とハンドホールの蓋の関係をまとめたいと思う。
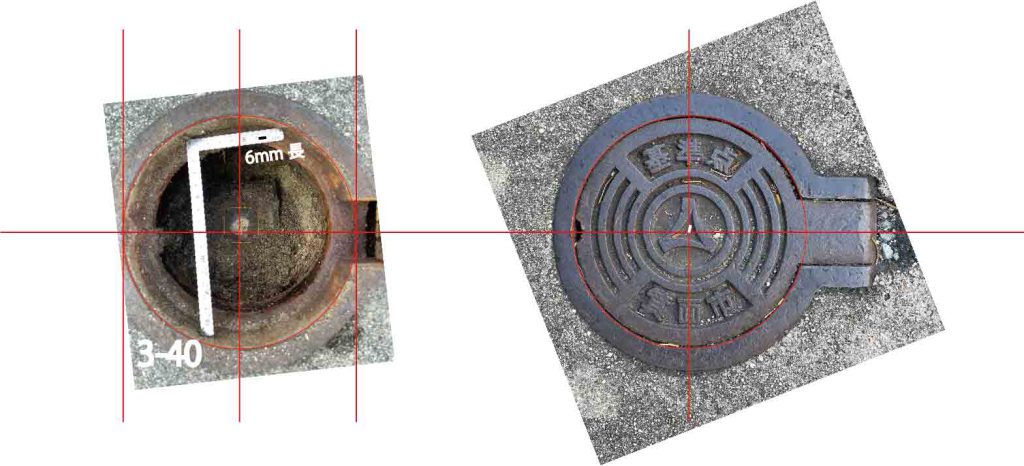
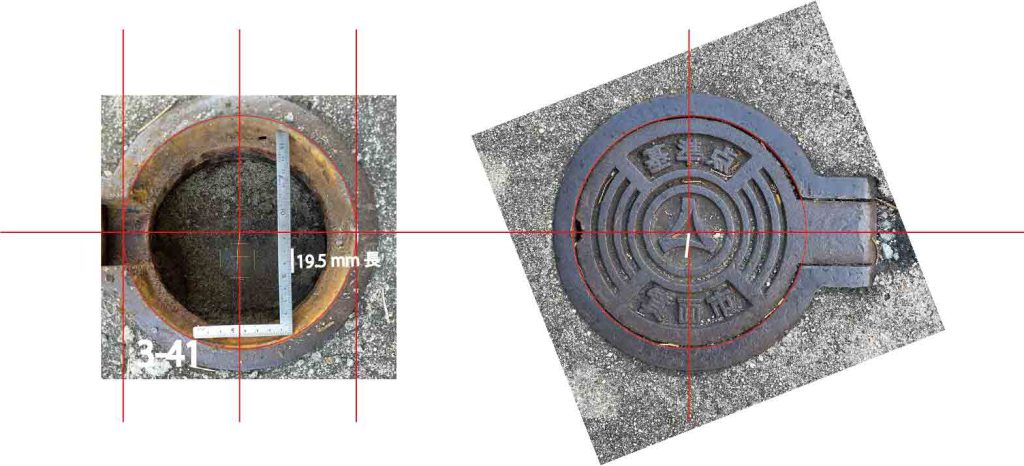
まずは,図45の3-40である。ハンドホールの蓋の画像は図19(Loc. 05)を利用した。ホール内の真鍮鋲の画像は図28のものである。ホール蓋とホール内の関係を捉えるには,右写真の蓋の外周から作成した円を左の写真に移して写真サイズを揃えなければならない。さらに,画像上のxy軸を平行にしなければならない。左の写真の真鍮鋲はかなり風化しており,真鍮鋲の外周が不明瞭のために,正方形の枠を設定する必要がある。図46の解像度は低く,左写真の真鍮鋲に設置した黄色の枠線が見にくいが,そのような措置をしている。そして,穴の中心から真鍮鋲の中心へのベクトルを求めた。その長さは6mmであった。右の写真の中心から右上方向に短い白線がみえるが,この先端が真鍮鋲になっているのである。この作業や今後の作業のエラー値を考えるとほぼ一致していると言えるが,エラーの重なりを排除するために,一応,この成果を生かして,CloudCompareでpickingする必要がある。蓋上面から真鍮鋲トップまでの深度は16.4cmであることを考慮して,平面直角座標系との対応関係を得る必要がある。以下,3-41と3-61の作業結果を図47と48に示す。3-41では中心位置が2cm近くあり,深度は14.0 cmであった。3-61では中心位置が1.92cmで,深度は14.8cmであった。
3.2 三等基準点を含むLiDAR測量例
3点の測量基準点情報を使って,一定の程度の精度が得られるかをチェックすることになる。
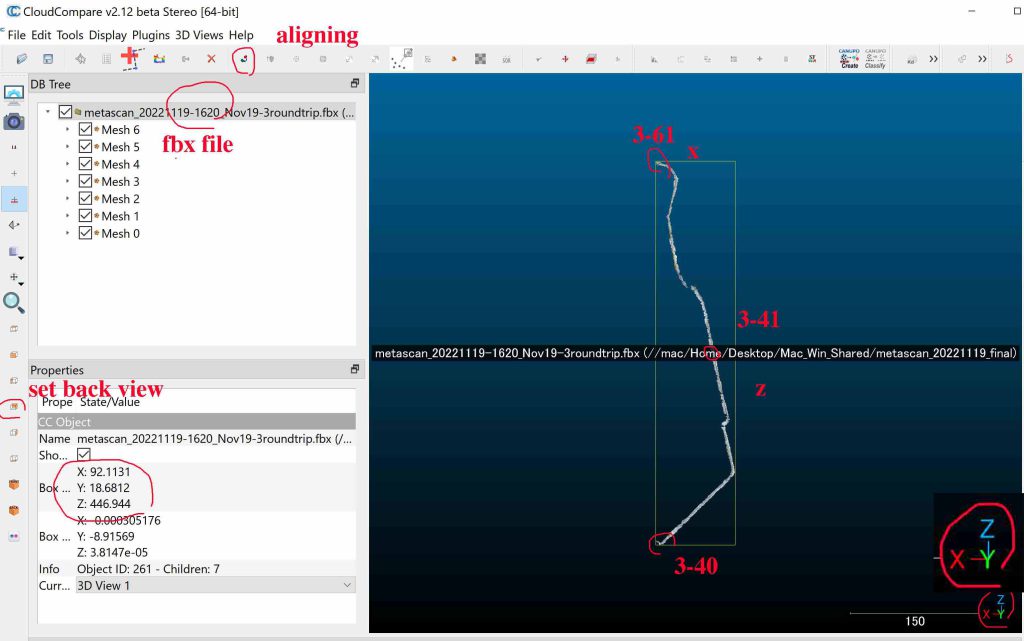
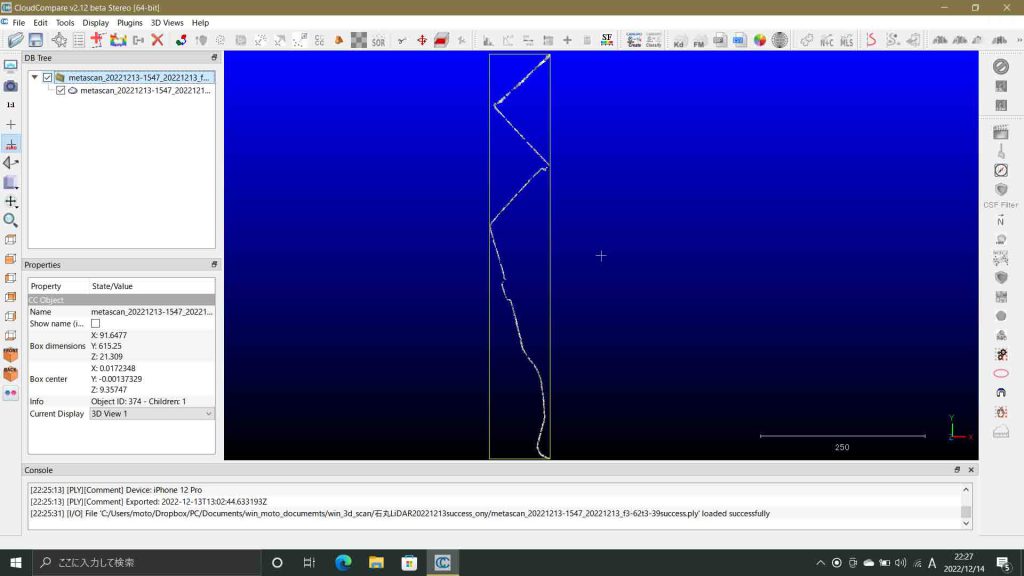
図49ではCloudCompareの画面の説明をしている。このファイルはfbxであり,基準点は3点(図中の3-61, 3-41, 3-40)をカバーしている。図39のマップと対照すると図49のスキャン画像のマップ上の位置を知ることができるが,全く方位情報が無いことがわかる。そしてこの図49は上空から見た画像である。この図49の画面の右下には小さく座標系が提示されている。図49ではその部分を拡大して配置している。スキャンルート図は適宜矩形域に配置されている。この図の横軸方向はX,縦軸方向はZとなっており,深さ方向がYとなっている。つまり,左手座標系になっている。この表示は図49の左端のツール群のset back viewを選んだ結果であり,CloudCompareからすると,set front viewでは右手座標系なのである。Metascanでのスキャンデータはそういう形になる。スキャンアプリによって異なると考えて良いだろう。fbxファイルはデフォルトではこのようになる。point cloudファイル形式の場合,CloudCompareに取り込む際に指定することができる。
point cloudから得られる画像の鮮明度は低く,この種の作業にはfbxを使うので,どうしてもこの限界がある。で,国土地理院の基準点は平面直角座標系だから,左手座標系になるが,単純に対応させることはできない。もちろん,LiDAR座標値には方位情報はなく,単に軸配置を次に示している。
LiDAR______ X Z Y
Plane_Cartesian_ Y X Z
以上,Dec. 13, 2022記。
3.3 三等基準点を何とか4点含める Dec. 13, 2022
図49のスキャンが大饗石調査前の最後のスキャン試行であったが,ここに含まれる国土地理院の三つの基準点付近を拡大表示すると,3-61と3-41のハンドホールの蓋の表示の鮮明度は低かったので,図47と48に示した拘りは十分に生かすことができないことがわかった。残念だ。
図49でaligningで指示したアイコン上にマウスを載せると,Aligns two clouds by picking (at least 4) equivalent point pairs,と表示される。基準点が少なくとも4点必要と言っている。CloudCompare開発者の指示には,「少なくとも3点と4点の場合があり一定しない」が,アプリのツールにmouseをホバーhoverする際に見える本段落はじめの指示が適切なのであろう。
そこで,本日Dec. 13, 2022には,一つのスキャンで基準点を4箇所含めるべく行動した。図49では3-61,3-41,3-40の三箇所が含まれるが,図39のマップで見て,さらに北上して,3-39を追加したいと考えたのである。天候に恵まれた。iPhone 12 Proの頭を45º上げて,ゆっくりとスキャンしていった。この速度では図49の範囲がギリギリ取得という結果になった。到底,3-39を追加することはできない。
iPhone使用中に時間を見ることができないので,懐中時計を持参して計測すると,MetascanでのLiDAR測量は最大10分間に過ぎない。limitに達する10秒前ぐらいだろうか,警告が出て終了してしまう。この開発会社info@aboundlabs.comに先ほどメールした。その内容は,I know your Metascan app is best among scanning apps for iPhone. I am sorry not to get more 10 minute long scanning. Please show me how to clear this limitation. Thanks alot. Dec. 13, 2022. である。10分間は余りに短い。何とかならないものか。なお,もちろん撮影範囲をダブりつつ,断続的な撮影をすれば,Cloudを繋いで行くことはできるが,精度は落ちるし,短い人生も使い切ってしまう。
iPhone 12 Proを45º傾けて,ゆっくりと歩いた場合,ぎりぎり,3点をカバーすることができる。基準点近傍については,丹念に一周している。4点をカバーするには,iPhone 12 Proの頭を上に30º傾けて,かなり早足で歩く必要があった。このトライの1回目は何とか成功したが,同じぐらい早く歩いたつもり(12月4日のホテルでの左足甲上の南京虫禍が展開中で化膿して腫れていて靴の圧迫が辛いという中での早足)であったが,疲れもあったのだろう,帰りのトライは失敗した。この早く歩いてのLiDAR撮影はかなり不完全なスキャンになる。スカスカほどではなく,一応連続させたつもりであったが,出来上がったものはかなりスカスカだ(スカスカでも空間の継続性は問題無いようだ?)。ただ,4箇所の基準点付近は一巡りしたのでハンドホール(このページ中,過ってアームホールなどとしている場合がある)の蓋はほぼ鮮明に捉えることができた。
なお,最後の4箇所の基準点をカバーすべく実施した12月13日最後のLiDARスキャン往復では,懐中時計とともに,充電器を使用した。その結果,iPhone 12 Proのバッテリー残量はほぼ100パーセントが維持されていた。iPhone 12 Proの電池残量が少なくなったから予備のバッテリーを使うのではなく,LiDAR測量やGPSの連続的利用の際には,スタート時から予備のバッテリーを使うべきだと思う。なお,この予備のバッテリーは Sanyo USB出力付リチウムイオンバッテリー KBC-L2B(INPUT: DC 5.0V, 500mA/1A; OUTPUT: DC5.0V, 1A MAX; 充電式リチウム電池: 3.7V/5000mAh 〘19Wh〙 )であるが,現在はパナソニックに吸収されたあと,生産終了。
以上,Dec. 14, 2022記。
3.4 三等基準点4点の平面直角座標値
3-39が新たに加わったので,「3.1 ハンドホールの蓋と三等基準点の関係」に追加する必要があり,イラレでの作業の後,図48の次に追加して図48’としたい。
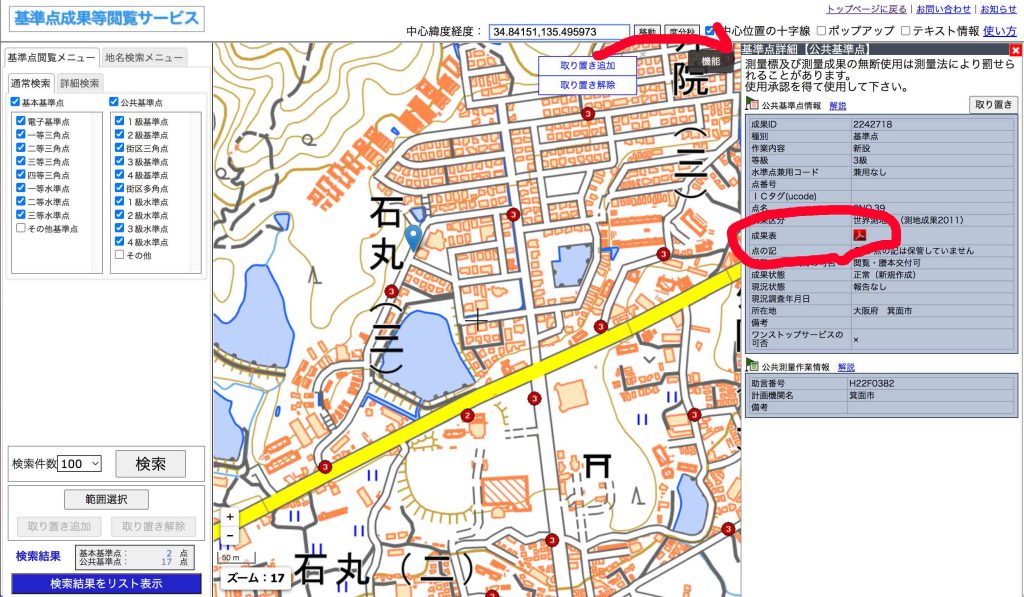
次に,4基準点それぞれについて,CloudCompareでpoint pickingを実施することになるが,そのまえに,4基準点の平面直角座標値をここにリストアップする。本ページの1.1に紹介した基準点成果閲覧サービスから直接入って,ログインすると,その後は,図50のように,地図上の検索結果に基づいて表示された基準点アイコンをクリックした際に表示される基準点詳細の成果表pdfをクリックすると閲覧できる。ぼくのmacの環境では直接印刷することはできず,表示中の成果表のスクリーンショットを印刷することになる。
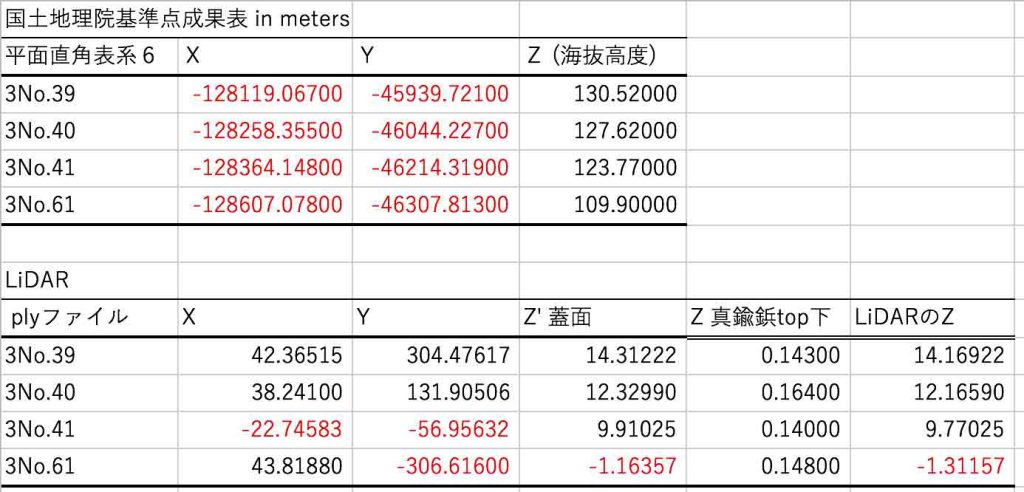
次の表1に結果をまとめている。
| 国土地理院基準点成果表 in meters | |||
| 平面直角表系VI | X northing | Yeasting | Z 海抜高度 |
| 3No.39 | -128119.067 | -45939.721 | 130.52000 |
| 3No.40 | -128258.355 | -46044.227 | 127.62000 |
| 3No.41 | -128364.148 | -46214.319 | 123.77000 |
| 3No.61 | -128607.078 | -46307.813 | 109.90000 |
4 LiDAR測量クラウドでのpoint list picking
一つのcloudから複数の座標情報を得るには,このpoint list pickingツールを使用する。CloudCompare Version 2.6.1 – user manual では,pp. 89-90 に掲載されている。使用勝手がよく結果は,表のテキスト形式で得ることができる。LiDAR測量結果についても後掲予定の表2を得ることができるのである。表1と表2から,高度や平面直角座標での位置の対応関係,つまりLiDAR測量の信頼性を検証することが出来るはずである。何故か,mac内のCloudCompareではpoint list pickingツールで使用できるウィンドウサイズが小さくて,mouseのCloudCompareを使わざるを得なかった。4点すべてをpickingしないと一まとまりの表にはならないので注意が必要だ。
FBXファイルの画質が圧倒的に良いので,これを使用する。図51のようにまずは基準点3-39を対象に実施した。
次に図52のように,基準点該当地点3-40をpickingしようとするが出来ない。左ペーンでは,図51と同様,Mesh9となっている。つまり,meshファイルではMeshを超えてこのコマンドを実行することができないのである。マニュアルには一つのクラウドで実行できるとあったが,meshファイルの個々のMeshはいわば別のクラウドになっているのである。meshファイルでは,事実上,point list pickingツールが使えないのである。
そこで,FXBファイルを諦めて,図53のように,point cloudファイルのplyを使うことにした。
まずは3-39該当点をピッキングした。画像が不明瞭でFXBファイルのようには実行できない。
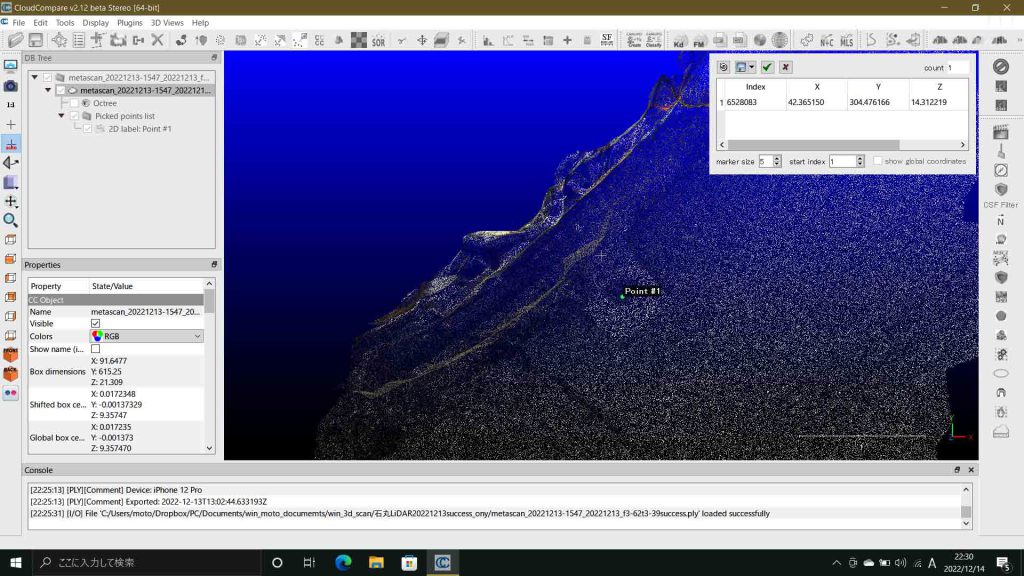
図55のように,二つ目のピッキングもできた。
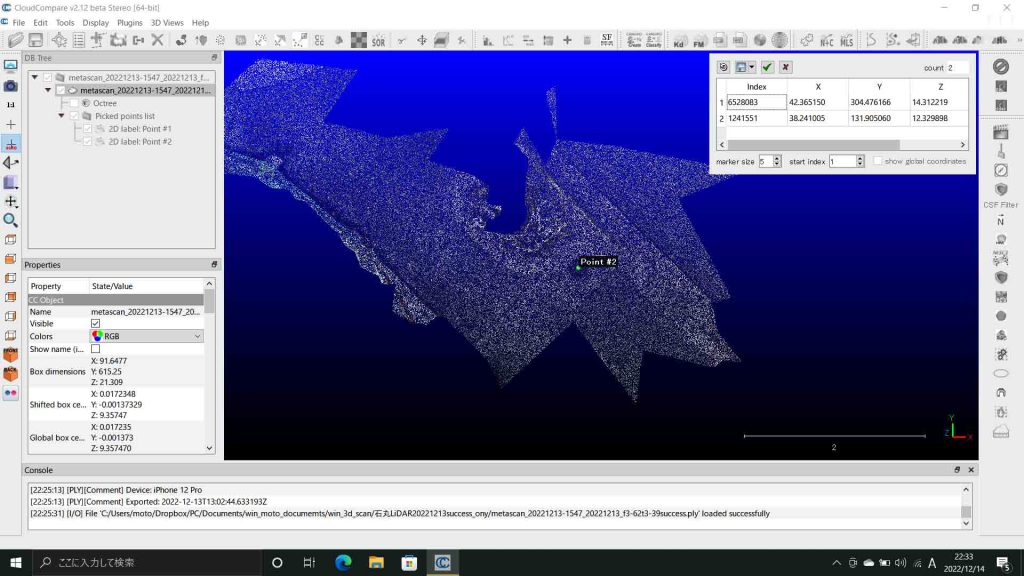
図56,図57のように3点目3-41,4点目3-61もピッキングできた。
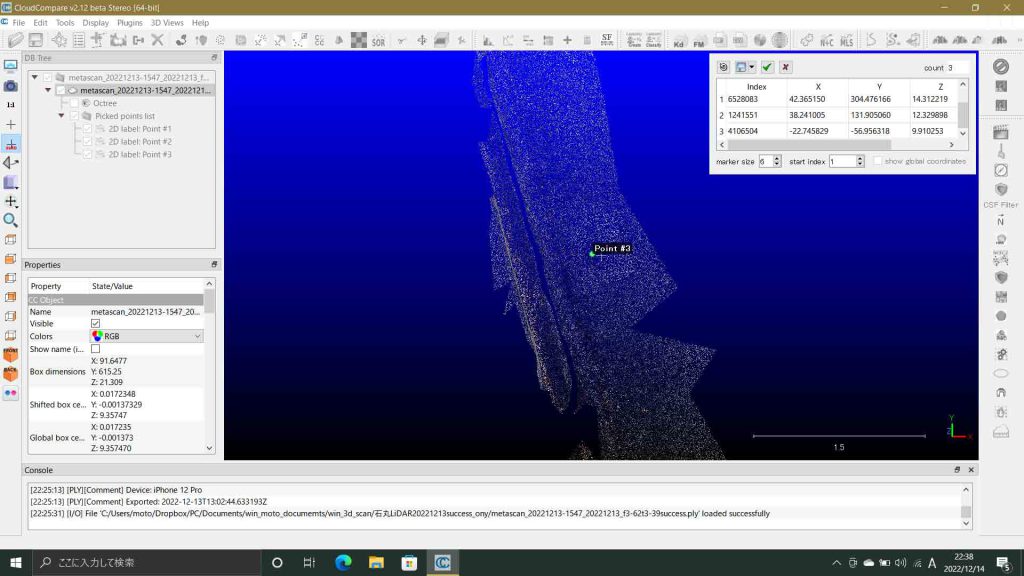
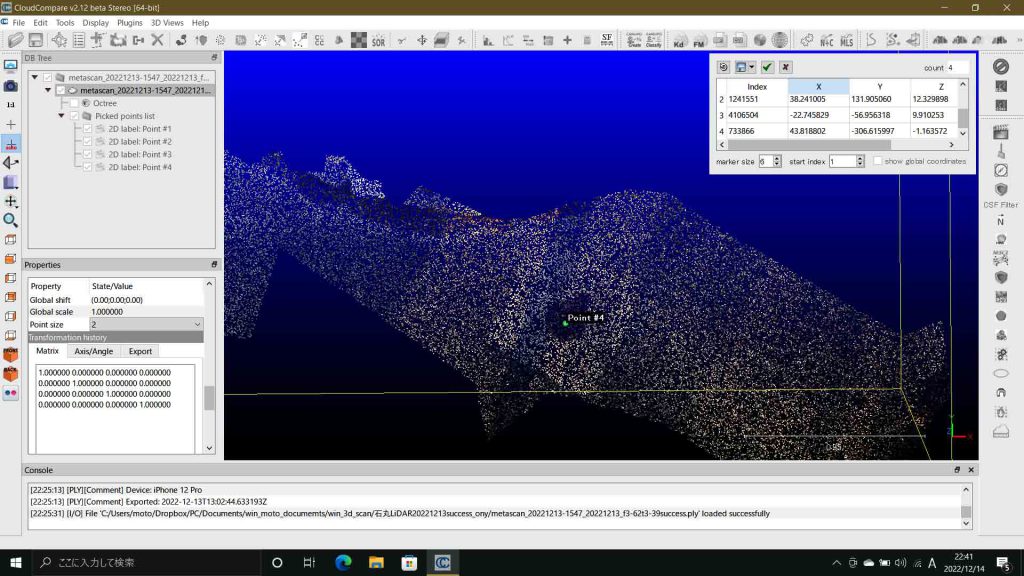
図58のように,4点の基準点該当点をピッキングすることができた。左の下段ペーンで”Show name”にチェックを入れているので画面中にファイル名が表示されている。なお,この図58では,右下隅のXYZ軸表示を拡大している。
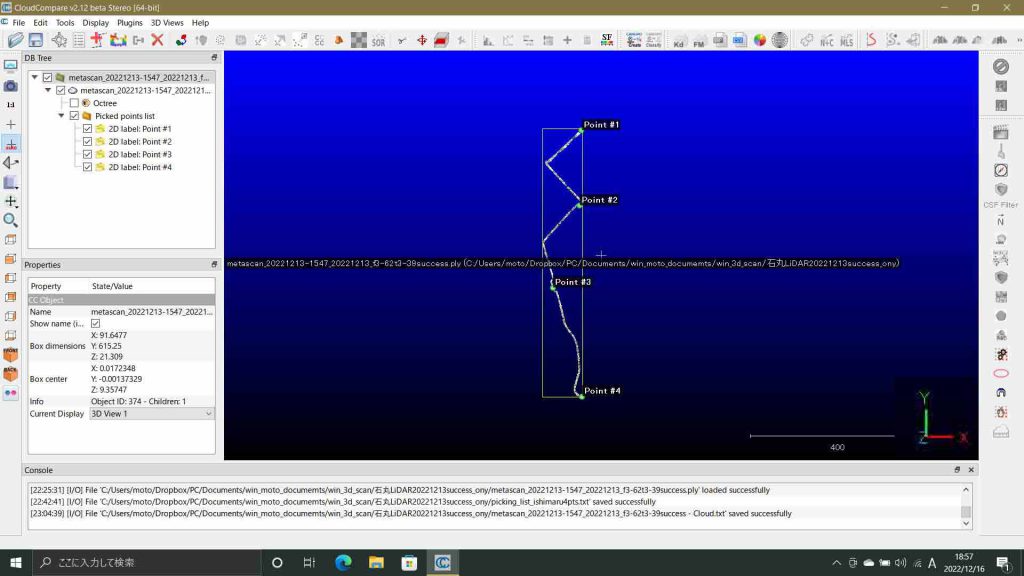
図57の段階で,画面右上の表のメニューのフロッピーアイコンをクリックすると四択があって,ここではlocal index, x,y,zを選ぶ(マニュアルp. 90 Export optiions参照)。出力されたテキストファイルを整理すると次のようになる。

5 LiDAR測量結果の座標値と平面直角座標系基準点座標値との対応

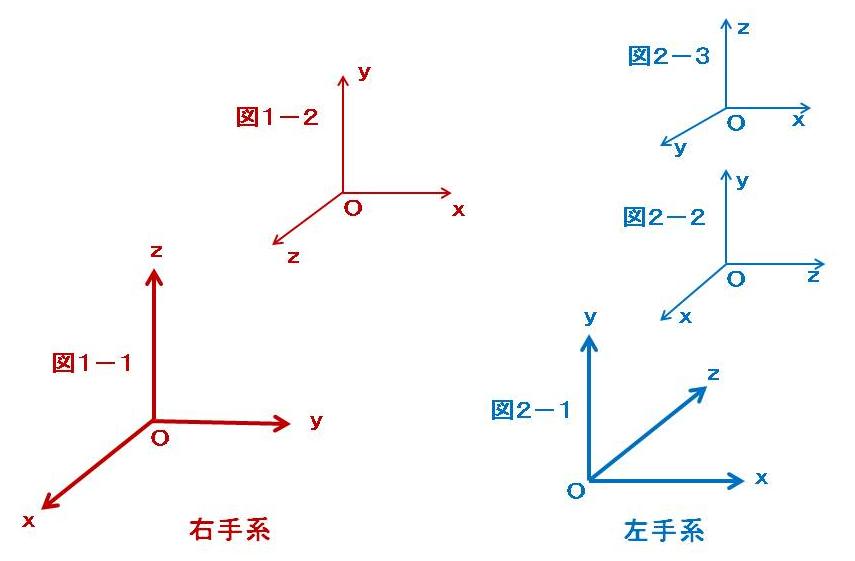
図60(3次元CGと座標系から)の右手座標系は学校教育で学ぶユークリッド空間(デカルト座標系)に対応しており標準的な座標系である。左手座標系は図59のような投影座標系など限られた領域で使用されている。
大阪府は,兵庫県を除く近畿地方をカバーする平面直角座標系6(図59)に該当する。原点は福井県の北部にあって,大阪府だとこの原点の南西に位置し,例えば表1のように,X軸もY軸もマイナスの値となる。石丸は大阪府の北縁に近く,南北軸と東西軸を比べると,原点からの南北軸の長さは大きい。南北軸はnorthing軸,東西軸はeasting軸と言い,前者をX軸,後者をY軸と言う。Z軸は海面から高く離れるほど+値が大きくなる。この関係は図60の左手系の図2-3に当たっている。
写真測量やLiDAR測量の結果は右手座標系で表現されている。Metascanによる測量結果を見ると,mesh系とpoint cloud系に分かれ,この両者で異なる座標系が使われている。meshのfbx形式は図49の右下隅の座標系表示(方位を除いてルート表示がマップと対応しうるback view)からすると,左手座標系が使用されている。これに対し,point cloudのply形式は図58の右下隅の座標系表示(top view)からすると,右手座標系が使用されているのである。
図58では,ply形式のLiDAR測量結果が示され,左右X,上下Y,奥行きというか手前への出っ張りZとなっている。この図では方位情報がなく,単に矩形域の表示を実行するために,XY軸が設定されているのである。iPhone 12 Proの重力方向(Z)軸だけが,平面直角座標系のZ軸方向と一致しているのである。
このように考えると,LiDAR測量結果を平面直角座標系に載せたい場合,XY軸の対応関係は問題にならないとは思うが,その対応関係を実行する際に,Z軸を4つの基準点に平行移動して,その後回転することを考えると,LiDAR座標系が右手系で,これを平面直角座標系の左手系に合わせることには違和感があるのである。
それでは,上掲の4基準点の「X値,Y値,Z値」の順を,「Y値,X値,Z値」の順にして,後のassigningを実行すべきかと言うと,そうはならないと思う。基準点だけ変更すると他の何十万以上の点とは独立した作業なので,完全に過ってしまう。つまり,LiDAR測量の座標値の配列を全部替えることは難しくは無いが,それよりも,表1(平面直角座標系基準点の4座標値)で,(X northing, Y easting)を,(Y easting,X northing)に替えることで,平面直角座標系を右手座標系に替えることができる筈である。後にassigningを実行して確かめたいと思う。
なお,ハンドホール蓋上の基準点の特定作業について,FBXファイルでの方がPLYファイルでよりも容易であり,FBXファイルでは,point list pickingを1点に限定するか,CloudCompare Version 2.6.1 – user manual pp. 87-89の”point picking”を実施して,座標値を求めて置くのもいいと思われる。FBXファイルの3-39対応の画像は,図51に示していて,この右上のpoint picking結果の表を見ると,次の最初の数値行のようになっている。この座標値と,plyファイルの対応関係を見ると(表2),次の二番目の行のようになる。
————————————————
FBXファイル X: 42.35611, Y: 14.310058, Z: -304.504669
PLY ファイル X: 42. 36515, Y: 304.47617, Z: 14.31222
————————————————
鉛直軸は,FBXファイルではY軸で,PLYファイルではZ軸になっている。この対応関係を知って,基準点対応座標値を読み替える必要がある。とはいえ,測量的な感覚から言うと,FBXファイルの結果には違和感がある。CloudCompareの表示の際も,set back viewの形ではじめて,平面図を得ることができるし,Z値がマイナス値になっているのは変換はできるのであるが,かなり問題であり,当方の座標値を扱う測量では,point cloud系のファイルが適当であることを改めて思う次第である。
6 LiDAR測量の現実空間の高い再現性
海抜高度と距離の再現性を評価すべくエクセルで処理した。表3はその基礎的データである。
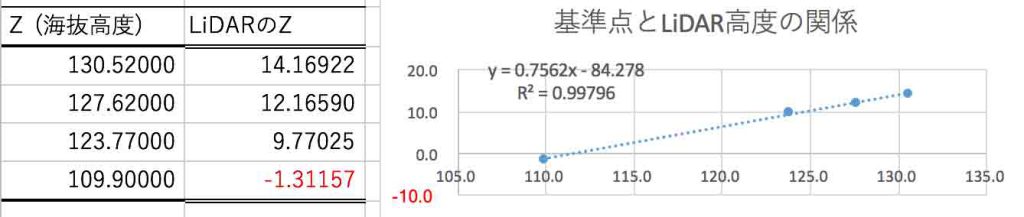
海抜高度の再現性を表4に示す。決定係数0.998だから十分な結果であった。
距離の再現性を表5に示す。3次元空間での距離計算を実施した。その結果,決定係数は1.000になった。
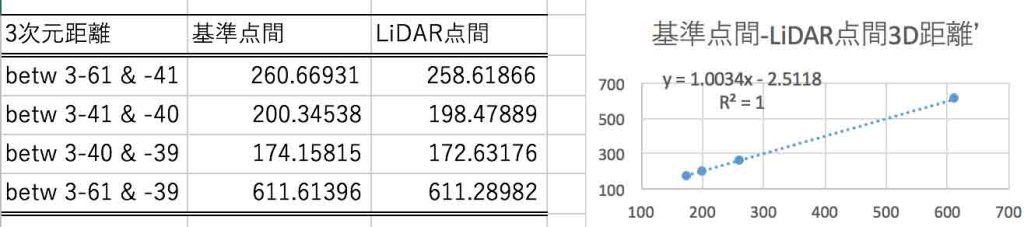
予想以上の結果となった。MetascanのLiDAR撮影が10分間に限られているために,4基準点での一周撮影を含めて,850mほどを時速5km余りで歩いた。撮影画像は一応繋がっているとは思ったが,実際はかなり脱落部があった。それでも,位置情報は継続されていて,このような結果になったのである。
当方の暮らす石丸で4箇所の三等基準点を何とか入れ込むという条件での作業であった。実際のフィールドワークでは,このような基準点を利用することはできず,潮位計測とGPSによる3D情報に基づくことになる。光波測距儀を使って基準点を幾つか設置して,その上でそのラベルを貼ったポイントをつなぐ形での測量ゆえに,石丸のようなタイトな条件では無い。
一人でも,光波測量,LiDAR測量は,無理なくできる。断面測量も複雑な地形を記録できるので,これまで以上に精緻な断面を描くことができるのである。Metascanを使った写真測量やLiDAR測量では磁北情報が無いので,光波測距儀での磁北セットが重要である。
LiDAR測量だけでラベリングした近接した二カ所の磁北からの角度を計測して,測量成果に磁北線を描くことは可能である。今後は磁北を意識した測量をすべきだと思っている。図56
7 平面直角座標系に従ってLiDAR測量結果をグリッド平面座標に
CloudCompare操作ガイド日本語メニュー版.pdfというものが公開されている。これは,全般的なマニュアルではなく,スキャン(写真とLiDAR測量)データをレファランス座標点に対応させるだけがテーマである。ここではこれを使用して,LiDAR測量の結果を国土地理院の基準点(平面直角座標系)にレファランスする作業を実施する。最も広範なマニュアルは,CloudCompareの開発者が作成した CloudCompare Version 2.6.1 – user manual であるが,この日本語メニュー版の使用例は紹介されていないように思う。開発者の用例では二つのクラウドを選んで,対応ポイント(またはversion 2.6からはメッシュにも対応)をピッキングする形だけだ。
この章の作業は,LiDAR測量結果を平面直角座標系6上に載せるということではない。載せることはできるが,ここではそうではなくて,(任意の)グリッド平面に載せるのである。
フィールドでLiDAR測量を実施して,その結果を自宅に戻って整理するのだけど,ぼくが必要なのは最長1kmほどの断面図や数百メートル四方の範囲の詳細な地形情報である。Metascan in iPhone 12 Proでは,記録時間は10分間に限定されているので,これを超える範囲であれば,座標系の平行移動と回転 に示した方法でどんどんマージして行くことはできる。どんどんとは言っても疲れるので,できれば一気にスキャンしたい。
とにかく,この章ではLiDAR測量結果を,グリッド平面座標に載せる過程を示したい。グリッド平面座標という表現は地図学では無いだろう。紙地図は普通,平面であり,平面直角座標系6のすべての地図は一つの平面上にある。そういうように設定されている。図59の近畿地方を中心とする平面直角座標系6は平面を為している。その上の基準点を使うのでグリッド平面座標とここでは表現している。
CloudCompareではそういうAlign (point pairs picking) (CloudCompare Version 2.6.1 – user manual pp. 101-104)のメニューが用意されている。以下,実行過程を示す。
図61では,LiDAR測量の結果得られたpoint cloudと,国土地理院4箇所の3等基準点(表1)が見える。これは,左ペーン上部のpicking listファイルを開いているからである。これが選択選択されているので,コンソールの矩形はこの4点がカバーしている。
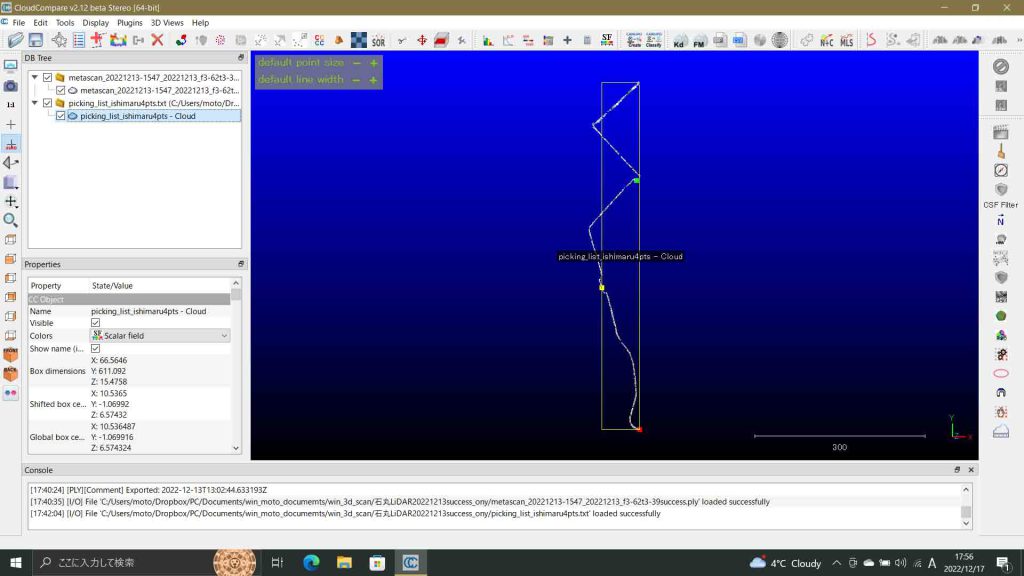
残念ながら,4点からなるpicking listはこの作業では使えない。図62のコンソール右上の表の上部(赤い矩形域には,読みにくいが,show ‘to align’ cloud,と表記されている)には,LiDARクラウドで新たにピッキングした4点のうち3点が見える。下部(黄色の矩形域には,読みにくいが,show ‘reference’ cloud,と表記されている)には,表1の情報を入力している。ただし,前述したように,表1の(X,Y,Z)を,(Y,X,Z)に替えて入力している。
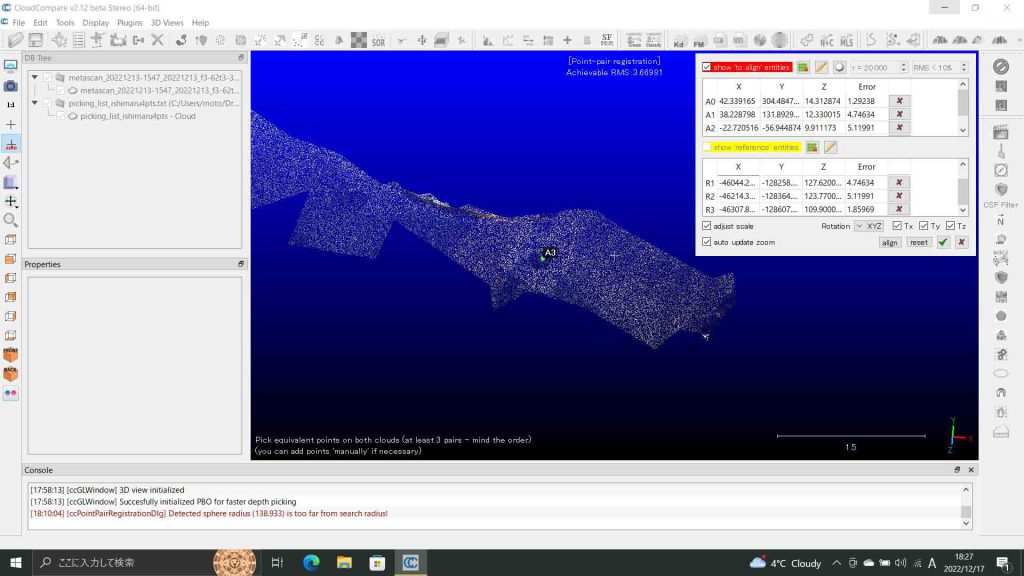
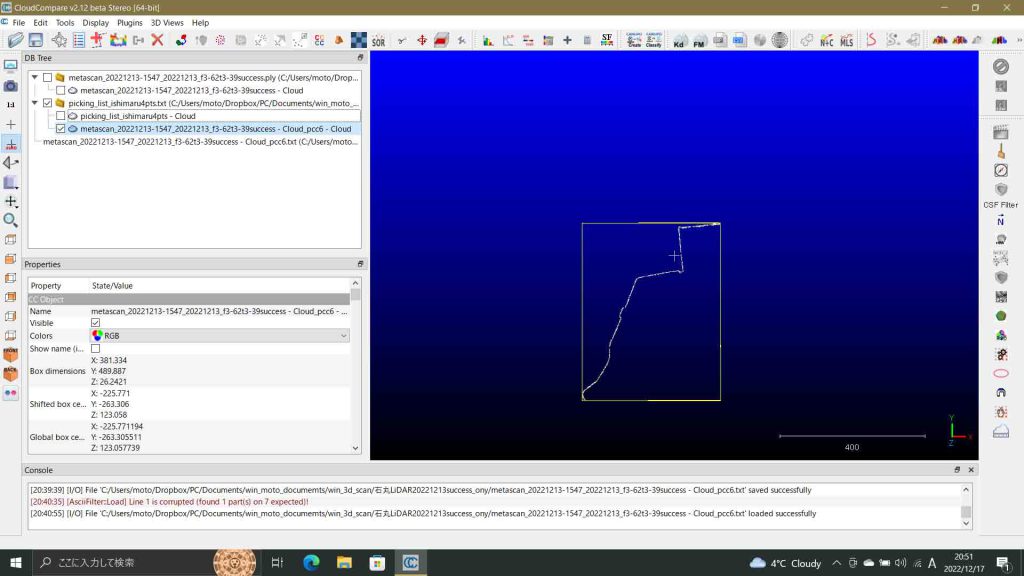
図63には,コンソール右上の表の最下段の ‘align’ ボタンをクリックした結果を示している。alignの実行の結果,LiDARクラウドはグリッド平面上に載ったために,図39の3-39から3-61までの赤ルートと一致するようになった。この章の求めたものである。
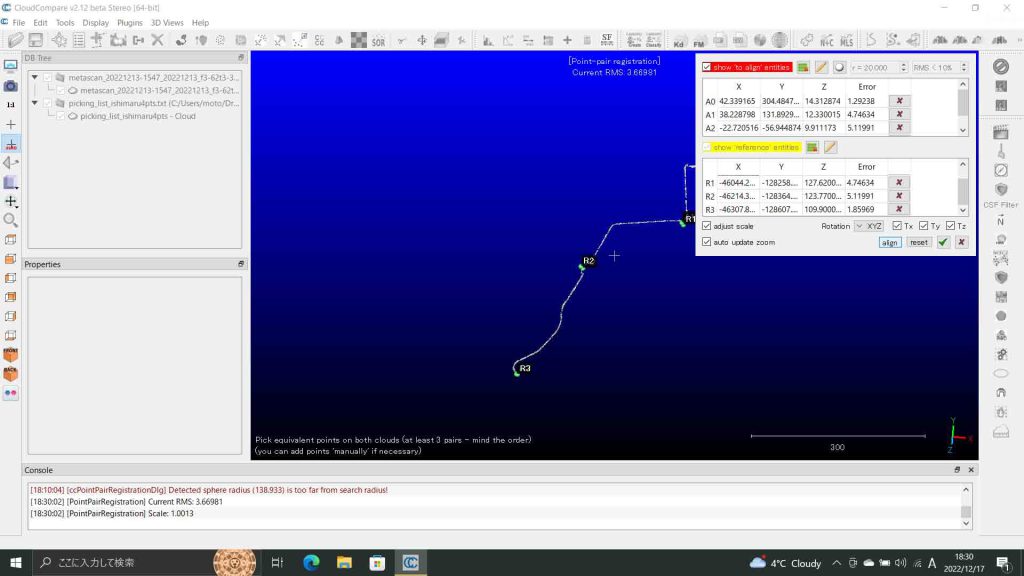
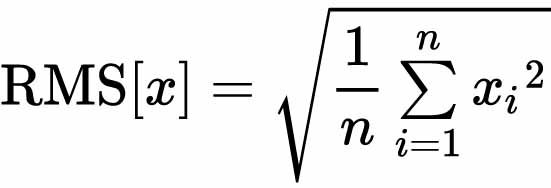
align,reset,の隣の✅️を実行した結果が図64である。aligningの表の上に現れたメッセージの最上段に見えるRMSは,左の式で得ることができる。国土地理院の4基準点のLiDAR座標値と平面直角座標値から4ペアの距離の二乗値の平均値の平方根(root mean square)である。
この値が3.67というのは,4基準点の位置の3D平均のずれが3.67mなのである。およそ850mを時速5km余りで歩いて取得した結果である。これをどう考えるかであるが,CloudCompareの例でも類似の値が見える。地形学的な研究ではこの程度の誤差は許されると思う。ぼくが野外調査で測量する場合は,国土地理院の座標値は使えず,光波測距儀でのいわば基準点測量を実施するし,基準点密度はより大きいので,さらに問題はないと思われるのである。
なお,以上のaligning過程では,実はLiDAR測量のハンドホールの蓋をそのまま,海抜高度に対応させてしまった。LiDAR測量結果では蓋面しか反映していないので,国土地理院の基準点の海抜高度から蓋面から真鍮鋲までの落差を差し引くべきであった。しかしこれをしたからと言って,RMS値3.67に反映するかどうかはわからない。
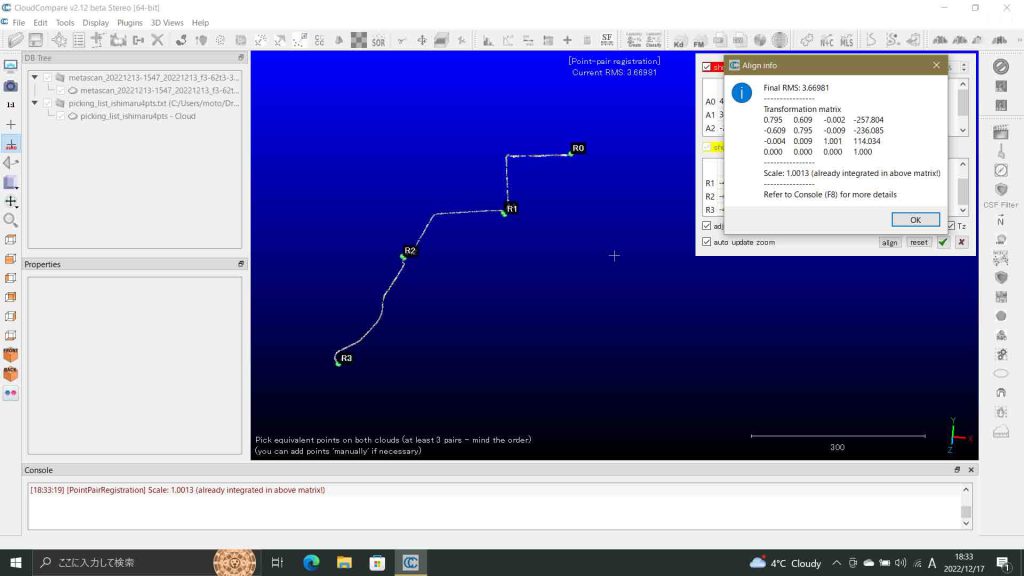
図65は,修正アドバイスである。当方の他のページでもこのテーマは記したような気がする。上掲CloudCompare開発者のマニュアルのp. 23にはこの説明がある。平面直角座標系の数値が非常に大きいことでこのメッセージが現れた。地理座標系ではこのような大きな値になるのは珍しくないこともこのマニュアルには記述されている。石丸のような狭い場所で,平面直角座標値をそのまま使わなくても,数十万の値のうちで,下3桁ぐらいに搾っても問題はないとは言える。
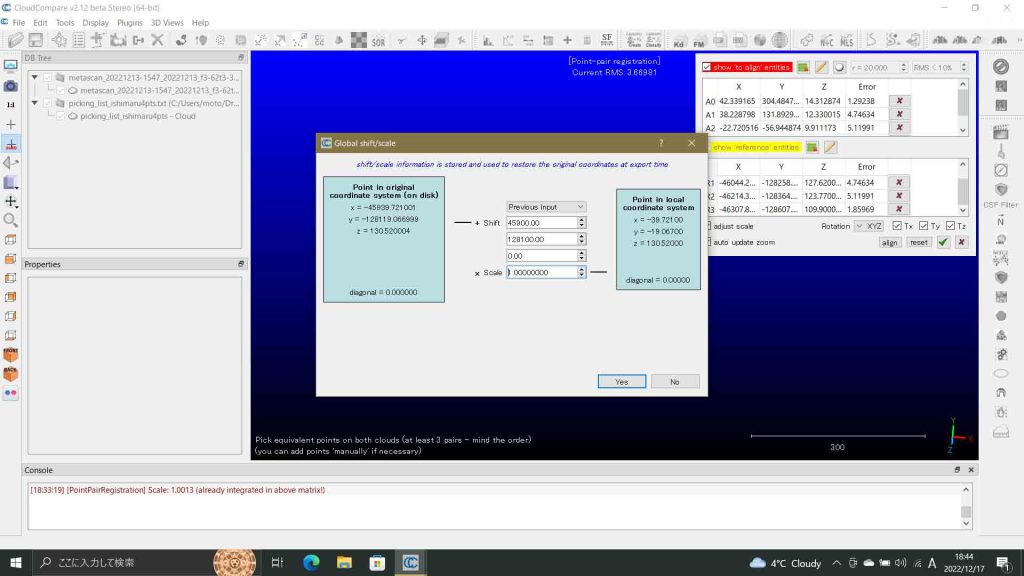
図66では,CloudCompareだけを選んでいる。
align後に得られた後,保存を選ぶと図67のコンソールが現れる。ぼくからすると,このデータはGrass GISで使えるぐらいであるが,3D計算をするのはこのCloudCompareの方が簡便でエキスポートする必要性はない。point数は75万余りになっている。
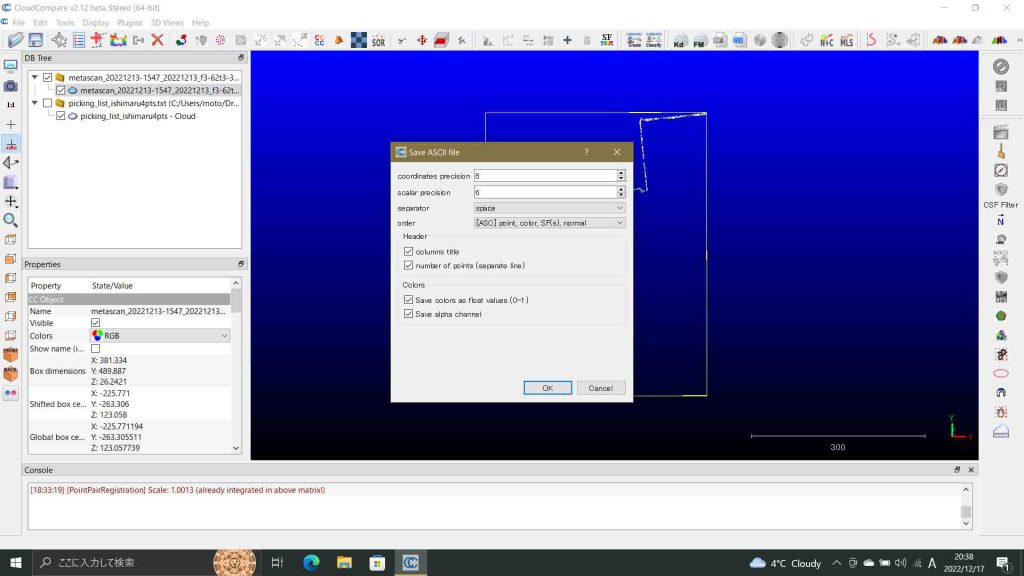
図68はASCIIポイントで表示した部分である。このように明らかにクラウドは切れてしまっているが,座標系の継続性が持続されていることに驚いている。
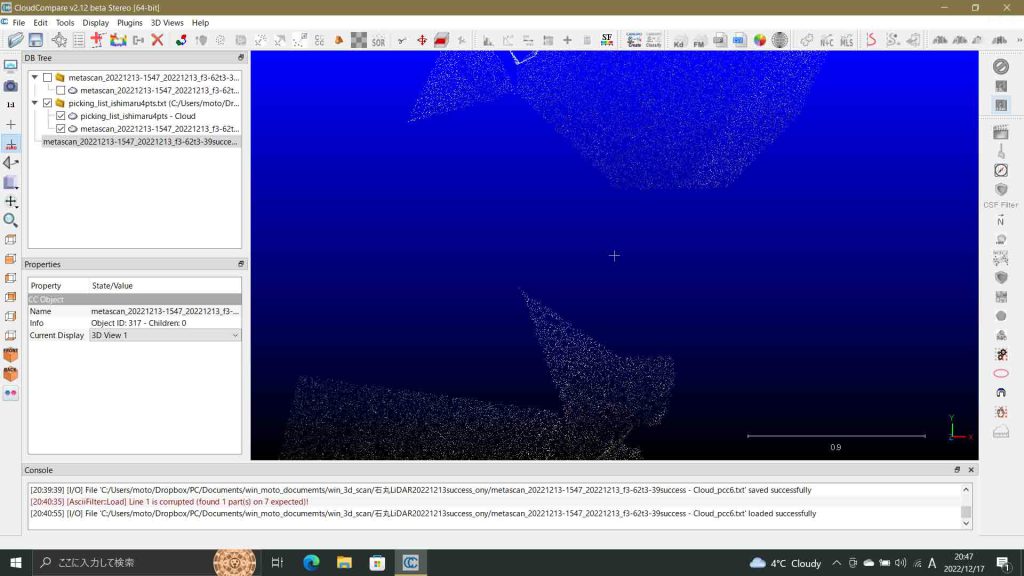
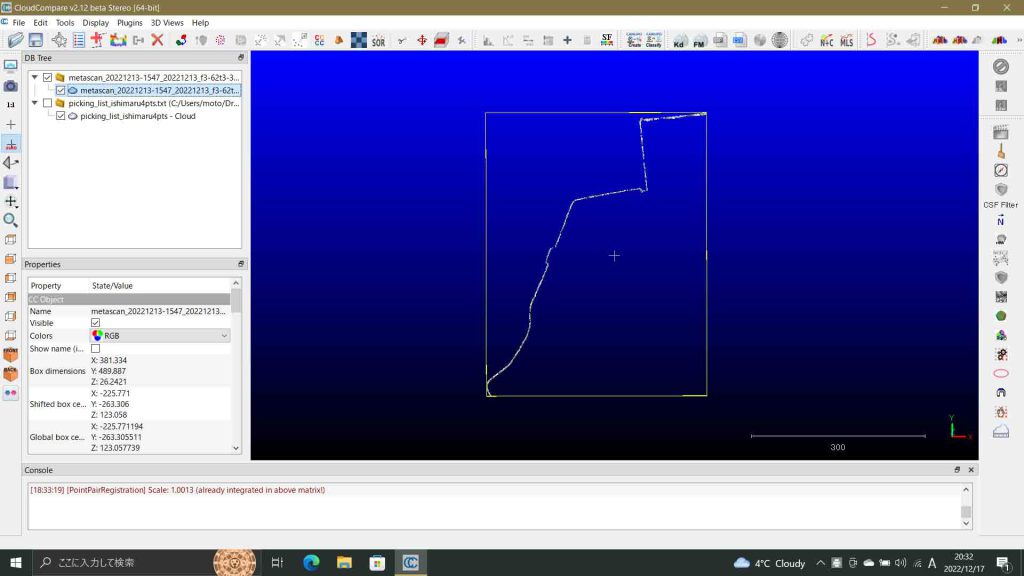
図69では,変換済みのクラウドと4基準点を表示している。レファランス過程を経て生み出されたグリッド平面に載せられたクラウドは基準点枠のすぐそばに位置しているのである。
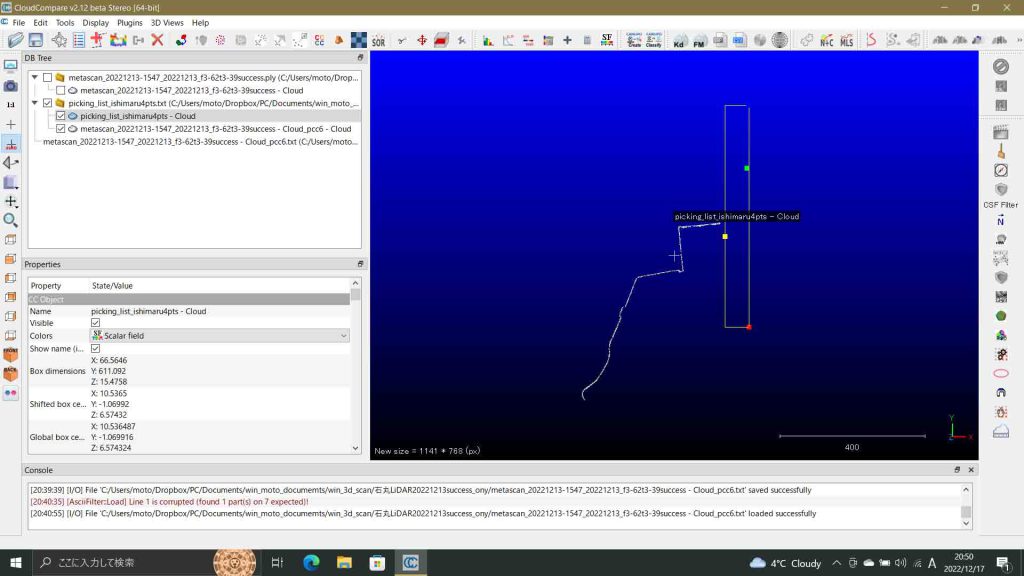
図70にはグリッド平面のクラウドだけを表示している。左のペーン上段で選ばれているクラウドに対応しているのである。
おわりに
以上,国土地理院の基準点を利用してLiDAR測量結果を研究に使えるようにするという目的は果たしたと思う。ここまで読み込んできた人が居て,さて,と思わないだろうか。断面測量ならば,ルート周辺の不要なクラウド部分を削除して,一定の幅をもったストリップを再現するところまで見てみたい,ということである。まあ,これは,今回,ゆっくりと歩いて3基準点を含めた連続性の確保されたクラウドで実行はできるのであるが,舗石や雨水口などは稀にあるが,まあアスファルトだけの道のそのストリップを作ったところで,面白くもないだろうと思い,止めにすることにした。
つぎは,元々の目的物である大饗石のクラウドを見てみることにする。ああそうだ,その前に,年賀状をなんとかしないと。今後止めるかも,考えないと。ハードワークだけど。まずは,文案だなあ。それが決まったらFileMakerでの処理に過程が続く。12月20日火曜日はアイスバーンの可能性がないのならタニハへ行くことになるだろう。
以上,Dec. 18, 2022記。