iPhone 12 Pro撮影の3Dスキャン画像の座標を捉える coordinates of point cloud obtained by iPhone 12 Pro in “CloudCompare”

はじめに
このページは次のページ: iPhone 12 Proで3Dスキャン から続くものである。すでに,iPhone 12 Proで,LiDAR+photogrammetry スキャニングして,その結果を点群ファイル PLYの形で出力している。無料公開されているアプリCloudCompareに,このPLYファイルを取り込んで,さて,どこまでできるか。このアプリを使って,点群の座標値が個々に見えるようにして,光波測距儀などを使って測量した地標との対応関係を取って,(x,y,z)値を変換することが一つ,次にそのモデルから改めて3Dモデルを作成し(元々のモデルと見かけ上同じものであるが),3Dモデルを我がものとしたいのである。それを踏まえて,切断面図なども出来れば作成したいのであるが,さてさて。
1 CloudCompare Windows版のインストール
出来ればmac版を使いたいがWindows版が作成された後で個人にmac版作成が任されているような印象である。macのCPUは,現在,Intel製からアップル製M1に移行している。ぼくのmacのCPUはIntel製でありmac版開発の方向性が不安なので,Windows版を使うことにした。
以上,Feb. 13, 2022記。
CloudCompare 3D point cloud and mesh processing software
Open Source Project http://www.danielgm.net/cc/
このサイトの始めにニュースレターの定期購読の登録ウィンドウがある。登録して半時間ほど経つがまだリアクションがない。24時間経って返事が無かったら問い合わせよとあるけど面倒だな。
ヘッドメニューからDownloadをクリックして,Latest stable release 2.11.3 Anoiaのうち,CloudCompare 2.11.3 Windows 64bitsのアイコンにmouseを載せると,Installer versionとArchive versionの二択になっており,Installer versionをダブルクリックする。144MB。ファイルを開く,をダブルクリック。変更を加えることを承諾が2回だったか。Setupウィンドウが出る。C:\Program Files\CloudCompare,にインストールされ,再起動画面が出て,強制的に再起動を選ぶ。
2 CloudCompareのメニュー構造
CloudCompare Wiki : ここにいわば,凡てが説明されているのであるが,プログラム開発者によるものなので,利用者はただ利用したいだけという視点が欠落しているとも感じられる。
PointCloudデータ編集可能ソフトCloudCompare概要: point cloudの専門家の簡潔な説明がある。CloudCompareでは,「ファイルを開く」が import のことで,「保存」が export のこと,という説明(?)は目からウロコであった。CloudCompareを使っていて驚くのは複数のファイルをimportしてファイル間の算術ができることである。compareというよりcloud間のcalculationができるということである。
3 まずはCloudCompareへのPLYファイルの取り込み
3.1 ドロップボックスのFLYファイルをWindowsマシーンにコピー
iPhone 12 Proのスキャニバースで撮影したファイルをPLY形式でドロップボックスにすでに取り込んでいる。macではクラウドのデフォルトサイトで,すぐに見ることはできるが,Windowsでのドロップボックス利用がわからないので,これから調べる。
Windowsロゴキー❖ + Eで見てもDropboxは無かった。Windowsストアでdropboxを検索して,Windows(S モード)版 Dropbox アプリ(Windows 10対応 iPhoneも対応しているようだ,11には対応しないようだ)をダウンロードしてインストールし,登録している情報でログインしたら,すぐにmacで見ることができるドロップボックスの画面が出てきた。ここから,WindowsのDocuments内のmoto+documentsフォルダにドラッグアンドドロップしようとした。これがうまく行かない。
スタートメニューの左ペーンを見てもみつからなかったが,最上部の最近追加されたものにはあり,右クリックすると「スタートにピン留めする」とある。ああ,そうか。Dropboxを探したが,Sモード版Dropboxなので,Sの場所を見ないと無い訳だ。
さて,macのようにドラッグアンドドロップが効かない。種々試して,次のようにすれば4ファイルをWindowsに運べた。ドロップボックスを開いて,右上の「複数選択」を選ぶ,をクリックすると,選択□が出るので,4ファイルの頭の□に✓。最下部のアイコンのうちの,↓を選んだがダウンロードできていない。メニューの「もっと見る」をクリックするとアイコンの説明がでた。「オフラインから削除」の意味らしい。でも見かけ上,変わらず。フロッピーアイコン「名前をつけて保存」を選ぶと,ファイルエキスプローラーが,やっと,出てきた。で,ぼく用のドキュメントフォルダーmoto_documentsに入れたつもりがない。もう一度やる。「実行リボンが出て,ファイルを保存しました」と出た。確かに入っていた。しっかし,面倒だなあ。macとWindowsの共有機能を使った方が早い。ドロップボックス内も見えるし,複数のファイルのドラッグアンドドロップで,macからWindowsにコピーできた。
で,別件だけど,Adobe Photoshopの新たな体験をした。Windowsとmac間で共有してmacに移動したスクリーンショットは,「ファイルがみつからない」というメッセージが出て,開くことができない。そこでドロップボックスを使ってコピーしても駄目,メール添付しても駄目。何らかのライセンスの問題だなあ。と思ったけど,ファイルをドック内のフォトショップのアイコンにただ載せることで開くことができた。ファインダのファイルをドラッグしてフォトショップのウィンドウに載せることはできないという制限だけだった。
3.2 CloudCompareにPLYファイルを取り込み
CloudCompareを立ち上げて,File>Open>で,ファイルを格納しているmoto_documentsを選ぶが,ファイルがないというメッセージが出る。で,右下のファイル形式の選択部があるので,PLY mesh (*.ply)を柄選ぶと,用意していた2ファイルが表示される。そのうち,昨日屋外で撮影したタニハ玄関の岩 7276kB を選んで,クリックすると,下部のファイル名の窓にそのファイル名が表示される。
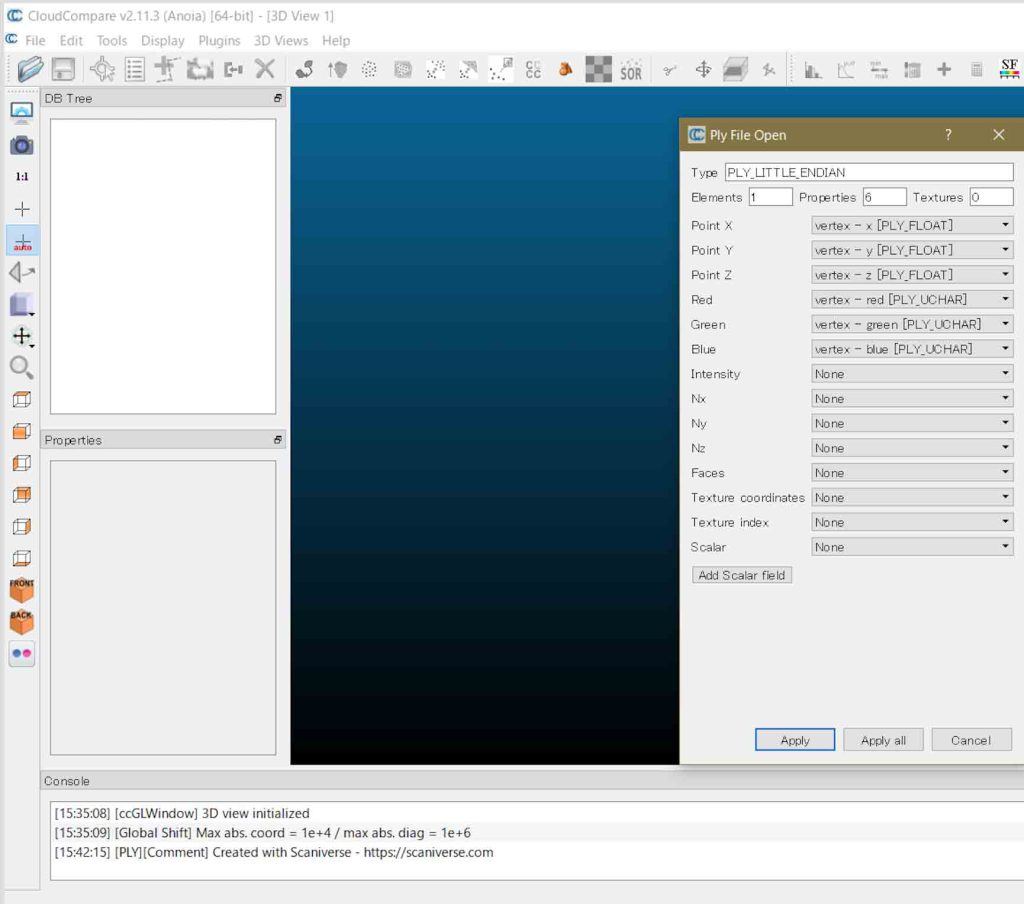
PLYファイルの構造が見えている。ポイント毎に,(x,y,z)座標値とpointごとにRGB値が埋め込まれていることがわかる。
座標値はfloating-point unit。RGBはunsigned char *pixels,つまり,an unsigned char between 0 and 255。
そして,図1のメーンペーン右下部の”Apply”を選ぶと次の3D画像が出る。さて,これから何が見えるかだなあ。
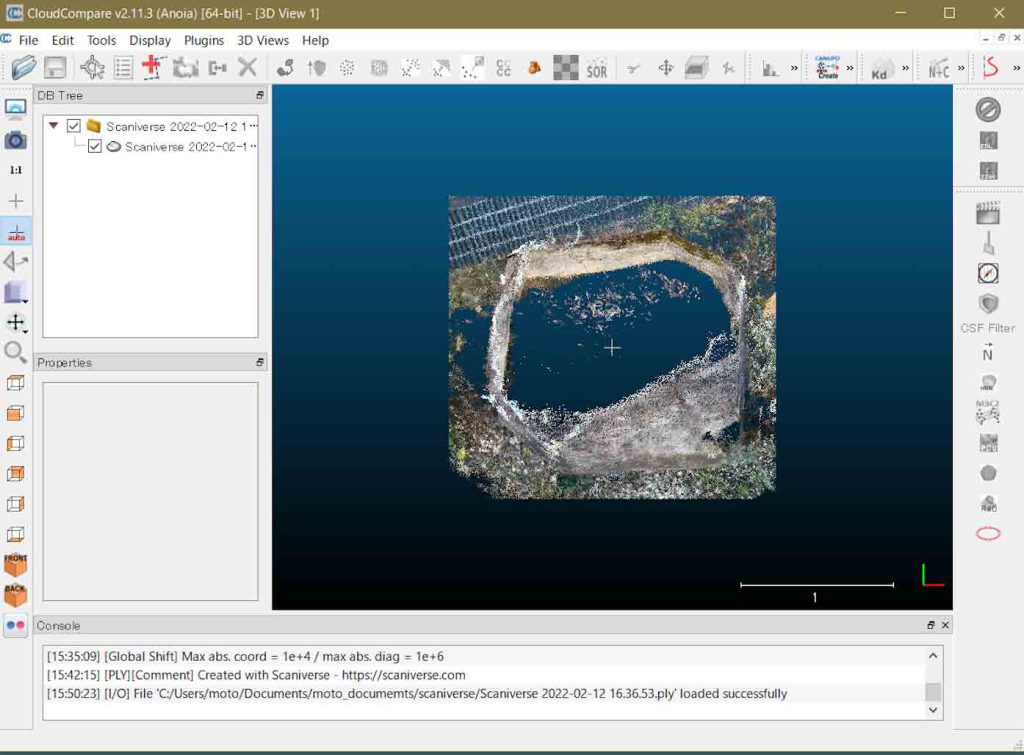
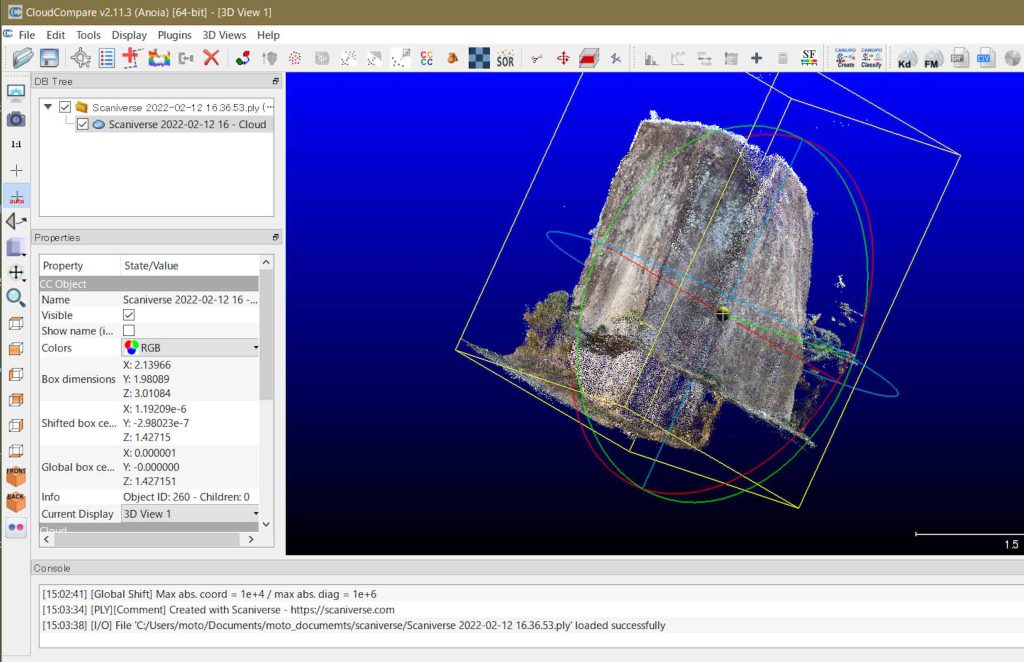
図3は,左上ペーンのDB Treeで”Cloud”を選んで,Cloudが黄色の枠で囲まれて,左クリックで回転しているところである。右クリックでクラウド全体の移動ができて,パッド上で二本指で奥方向に押すとズームイン,手前に引くとズームアウトされる。mac対応アプリだと逆の可能性がある。この図の岩の稜線付近にシェードが付いた黄色の小球が見えるが,これが座標の原点である。Scaniverseによる撮影の際に自動で決められたものらしい。この付近から撮影を始めたことと対応しているのか。
4 3Dスキャン図を自らの陸標 landmark に合わせる
現地調査で,Scaniverseを使って,測量対象域をぼくと対象物が5m以内に入るように次から次へと移動してゆく。どんどんLiDARが取り込んでくれる。そして,3択のうち最も高い密度の情報を選ぶことになる筈である。
ただ,これが本当にできるかどうかはわからない。100mほどの距離で露頭が出ている屋外でやる必要がある。亀岡市に位置するタニハの前には特養があり,その側面と裏山にあたる場所で重機が活躍して,山林を破壊している。近所のおっさんの話では,大きな墓地ができるという。特養の社員スタッフに特養の隣に墓地はどうなんだろう,って,聞いたら,全然知らなかったって。で,まあ,この付加体丹波層群の露出したこの墓地用地を100mほど歩いて撮影してみよう。
ファイルがでかくて,最も高精細情報は保存できない可能性がある。保存できたらありがたいけど。できない場合は,粗くてもいいかと思っている。陸標landmark(6点が良いようだ,最低3点)を設置する必要があるが,退職時に全部置いてきたので,測量器具がない。どうするか? これから何回使うかを考えると,ノンプリズム光波測距儀,を購入する意味はない。レンタルだろうなあ。
まあ,さし当たり,距離100mほどの撮影だな。この墓地用地で造成中の道路はうねうねと上っていて,求める画像取得に適している。LiDAR感知距離最大値5mでやってみよう。
4.1 Point picking
CloudCompare Wikiのうちの,Tutorials and GuidelinesのPoint picking and Point list pickingのうち,Point pickingから見る。

メーンメニューの,Tools>Pointpicking,または上縁アイコン群の3番目の左のアイコンから入る。
このツールでは,表示されている3Dスキャナー画像上で,クリッククリックして座標値などを得ることができる。2点間の距離やポリゴンの面積なども求められるが,ここでは,1点の座標値を得たいと思う。
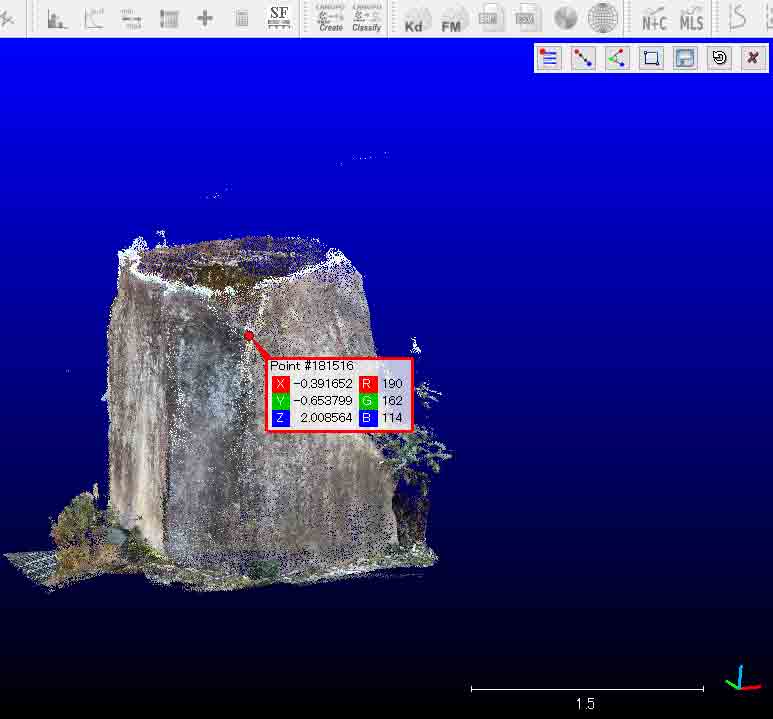
図4右上の7アイコンツール左端のpoint pickingアイコンをクリックして,図4のように,cloudの1点をクリックすると図4のように,standard label情報が現れる。ツール右端に隣接する回転矢印をクリックすると,pointの位置決めを,繰り返し,やり直すことができ,右端から3番目のフロッピーのアイコンをクリックすると現状を保存でき,さらに点群を追加して行くことが出来る。
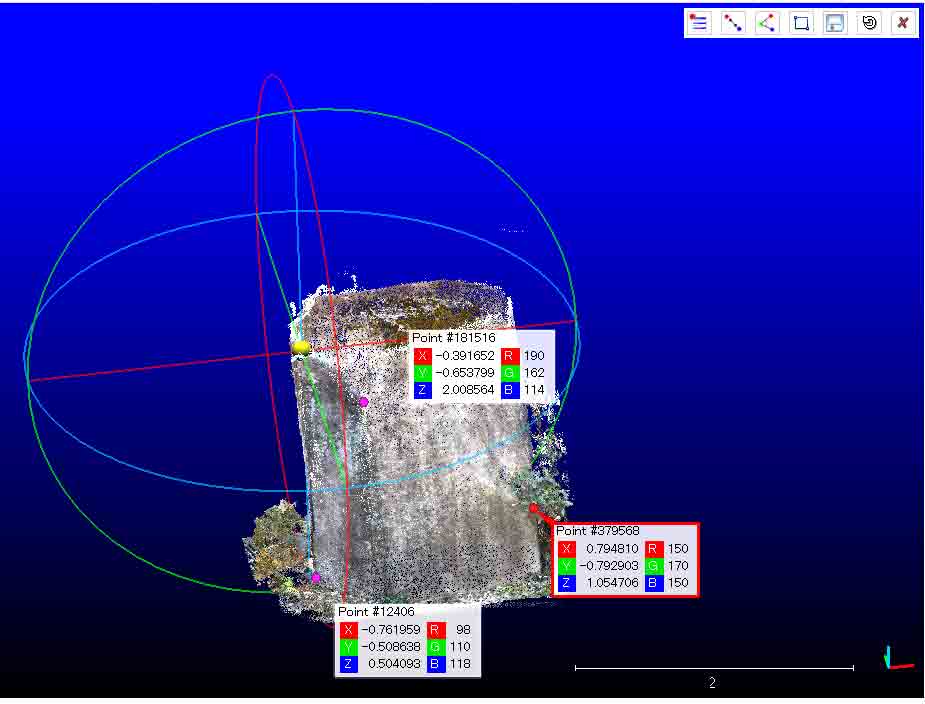
図5はcloudをプレスアンドホールドして観察するとxyz軸の関係が見える。Xには赤,Yには緑,Zには青が使用されており,線形代数が採用している右手座標系(掌を上方にして)に対応している。この図で原点と見えた黄色の小球は,CloudCompareが3D表示のために用意したものであった。言い換えると,Scaniverseが3Dスキャンして自動設定した座標系とは異なることが判明した。
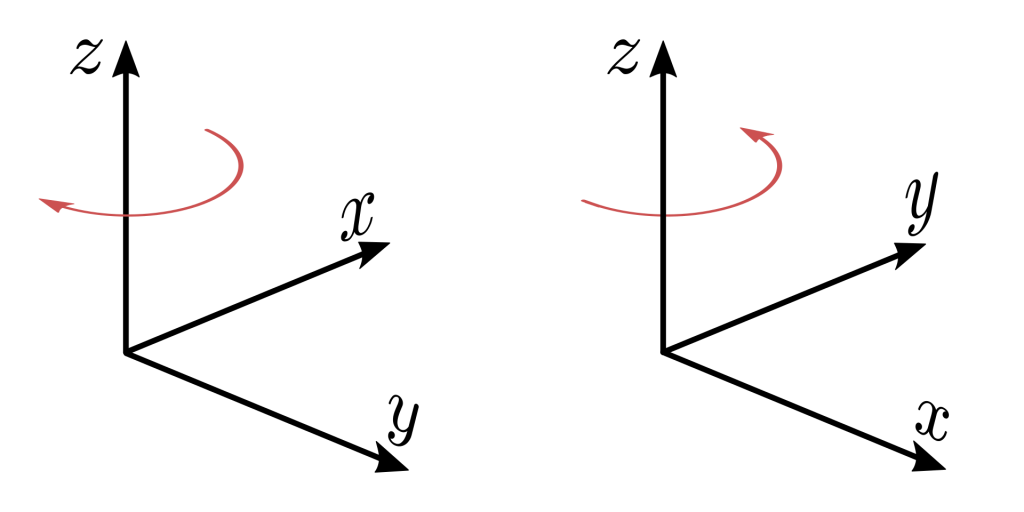
図6は,Wikipedia掲載のもの。測量分野では平面直角座標系などのように左手系であるが,LiDARや写真測量技術を使った測量では,線形代数の右手座標系が使用されている。DEMデータなどは左手系なので,取り込む際に,注意が必要である。

左図のようにpoint pickingアイコンの右隣のアイコンか,メーンメニューの ‘Tools > Point list picking’を選ぶ。
4.1は,LiDARで取得した座標系を地図座標系や自ら作成した座標系に平行移動させるために陸標を手がかりにフィットさせるためにあると考えて良いだろう。4.2は,その確定した座標系で,画像を見て地形の特異点や,現場で観察した社会現象などが生じている場のマークなどをするためのツールと言える。
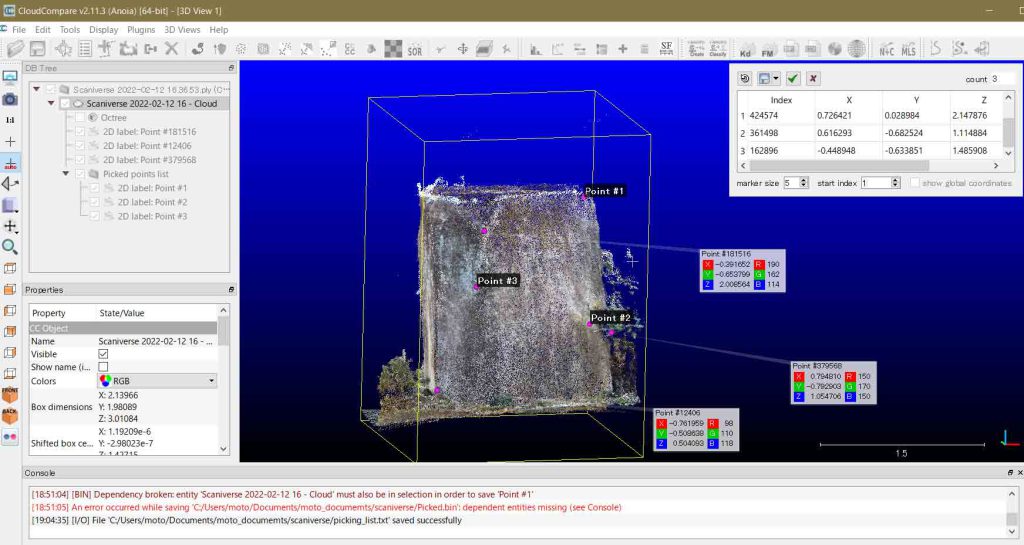
このタニハの門柱では特に有用な情報も得られないので,適宜,3点のみ,作成してみた。右上の表はテキストファイルxyzで出力できた。この3Dスキャンファイルそのものを保存してもこの表は保存されないので,表が出ている時にフロッピーアイコンを押して保存しなければならない。✓アイコンの機能がわからない。なお,この図7右上の表の,xyzテキスト出力(ここでは示していない)を見ると, 図7左端の1〜4といった行番号もIndex値も記録されていない。pointの登録の順番を手許で記録しないと後で意味がわからなくなる。Index列の数値が何を意味するのか,これもわからない。
図7左手のDB Treeには,Pickingの結果は示されているが,3Dスキャンファイルには保存されないので注意が必要である。
以上,Feb. 14, 2022記。
この章のテーマの達成は頭の中でほぼ想定できたが,実測値がないのでこれ以上,進めない。実測値を得る方法を考えないといけない。ボッシュのレーザー距離測定器を以前購入し,角度計測ができないので,実際の仕事には一度も使わず,放置して,その保管場所はある程度覚えている?が,これを生かす方法はないのか,考えている。
iPhone用ARアプリで使える緯度・経度を元に、方位角の求め方!! ではiPhoneで方位角は求めることができる。鉛直角もiPhoneの機能から求めることができる。そして最短距離はこの距離測定器で求めることはできる。でも,測定の度に3つの結構疲れる操作を続ける訳には行かない。ライカでも考えそうな気はしているが,まだそういう商品は無い。今売られているレーザー測距儀でも三脚はしっかりしていても肝心のツールとの接続がガタガタで,ターゲットを正確に狙うことができない。視線軸の設定には望遠鏡は欠かせないなあ。結局,今販売されている光波測距儀のハードでは簡易版,ソフトウェアはより高度のものが必要になるねえ。次の製品,気になるなあ。
Hot販売Low価格600mノンプリズムトータルステーションDADI DTM752R/ Leica TS06トータルステーションChina製販売のための
ぼくの関心はiPhone 12 Proが海岸地形研究に生かせるか,である。で,タニハがある亀岡市本梅町で墓地造成中の付加体露頭を,昨日,撮影して,まずはiPhone 12 ProのLiDAR利用の可能性を調べてみた。次のページに続くことになる。このページは途中ではあるが,以上で留める。
本ページの第4章は途中になったが,本ページの目的を果たすことはできている。実際の調査の際には,光波測量などを実施することになるし,4点ほどの陸標情報も得ることができる。iPhone 12 Proのすごみであるが,重心方向は把握されていて,Z軸は重心軸と平行である。3Dスキャン点群のZ軸のゼロ点は現地での海面高を測定して潮位計算をして得ることができる。XY軸の方位軸も陸標との対応関係から3Dスキャン点群を磁北または真北に回転することが可能である。それゆえ,3Dスキャン点群の座標値が得られれば,事実上,光波測量の座標系に載せることができるので,殊更,3Dスキャン点群をこのCloudcompareでtransformationする必要性は,ない。
このページで目指したことは次のページで実現している。 座標系の平行移動と回転(Mar. 1, 2022記)
以上,Feb. 16, 2022記。